3D 建模相关:
[TOC]
1> 1803.11527v3 [SpiderCNN] Deep Learning on Point Sets with Parameterized Convolutional Filters
利用参数化卷积滤波进行点集深度学习(ECCV2018-13)
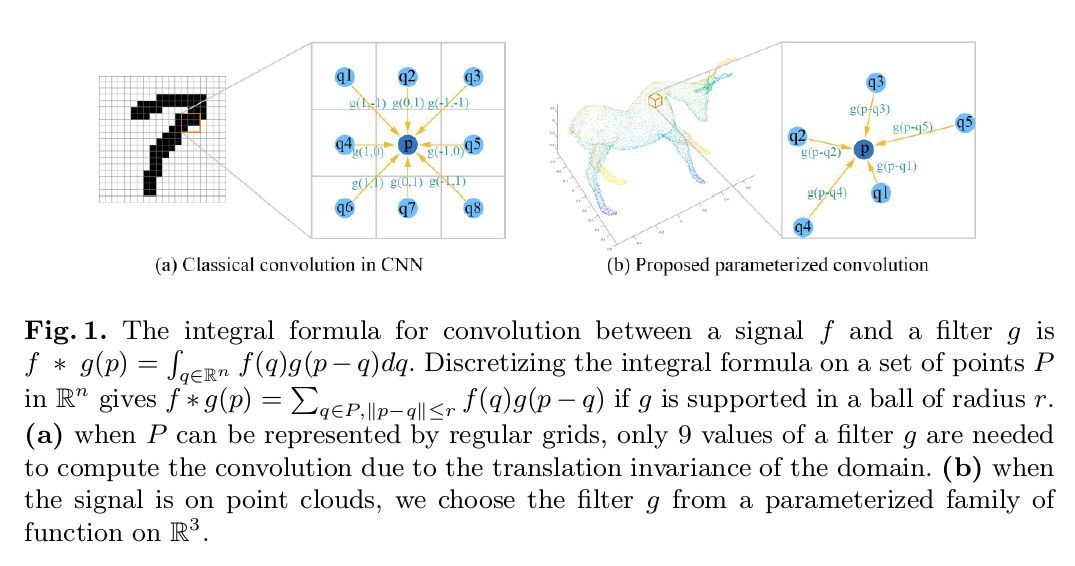
Deep neural networks have enjoyed remarkable success for various vision tasks, however it remains challenging to apply CNNs to domains lacking a regular underlying structures such as 3D point clouds. Towards this we propose a novel convolutional architecture, termed SpiderCNN, to efficiently extract geometric features from point clouds. SpiderCNN is comprised of units called SpiderConv, which extend convolutional operations from regular grids to irregular point sets that can be embedded in Rn, by parametrizing a family of convolutional filters. We design the filter as a product of a simple step function that captures local geodesic information and a Taylor polynomial that ensures the expressiveness. SpiderCNN inherits the multi-scale hierarchical architecture from classical CNNs, which allows it to extract semantic deep features. Experiments on ModelNet40[4] demonstrate that SpiderCNN achieves state-of-the-art accuracy 92:4% on standard benchmarks, and shows competitive performance on segmentation task.
深度神经网络已经在各种视觉任务中取得了显著的成功,但是将CNNs应用到缺乏规则底层结构(如3D点云)的领域仍然具有挑战性。为此,我们提出了一种新颖的卷积结构,称为SpiderCNN,以有效地提取点云的几何特征。SpiderCNN由SpiderConv单元组成,通过参数化卷积滤波器族,将卷积运算从常规网格扩展到可嵌入Rn的不规则点集。我们设计的滤波器是一个简单的步长函数和一个泰勒多项式的乘积。SpiderCNN继承了传统cnn的多尺度层次结构,可以提取语义深度特征。在ModelNet40[4]上的实验表明,SpiderCNN在标准基准上的准确率达到了92:4%,在分割任务上表现出了较强的竞争力。
我们提出了一种卷积架构SpiderCNN,它旨在直接从点云中提取特征。我们验证了其在分类和分段基准方面的有效性。通过离散化如图1所示的卷积积分公式,并在上使用一系列特殊的参数化非线性函数作为滤波器,我们为点云引入了一个新的卷积层SpiderConv。
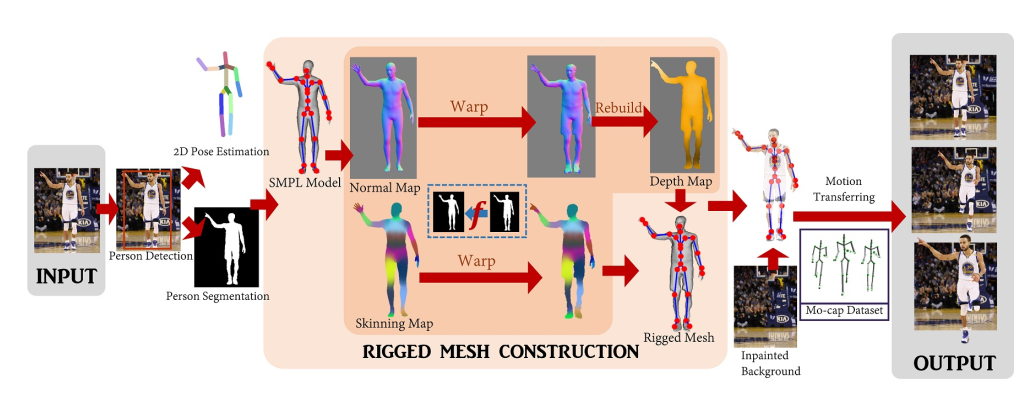
2> 1812.02246 [Photo Wake-Up] 3D Character Animation from a Single Photo
CVPR 2019
系统的核心是:找到人物轮廓和SMPL轮廓之间的映射,将SMPL贴图变形到输出,并通过整合变形的贴图来构建深度贴图。