[TOC]
三维坐标变换原理-平移, 旋转, 缩放
基础知识 齐次坐标 给定一个二维点(x, y),那么形如(kx, ky, k)的所有三元组就都是等价的,它们就是这个点的齐次坐标(homogeneous)。齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示,是指一个用于投影几何里的坐标系统,如同用于欧氏几何里的笛卡儿坐标一般
矩阵的乘法 矩阵的乘法运算,阮一峰老师写的比较清楚,具体可以看 这里
矩阵的线性变换 矩阵的线性变换就是从一个线性空间 $V_1$ 的某一个点跃迁到另一个线性空间 $V_2$ 的另一个点的运动。也就是说是一个点不仅可以变换到同一个线性空间中的另一个点,而且可以变换到另一个线性空间中的另一个点去
矩阵和线性变换之间的关系 : 矩阵本身描述了一个坐标系,矩阵与矩阵的乘法描述了一个运动。换句话说:如果矩阵仅仅自己出现,那么他描述了一个坐标系,如果他和另一个矩阵或向量同时出现,而且做乘法运算,那么它表示运动(线性变换)
数学表述为: $\vec{b}=M\vec{a}$, 即矩阵 M 描述了向量 $a$ 到向量$b$ 的运动
如将三维坐标D1经过矩阵M变换到坐标D2, 就可以表达为:
$$
y2 \left( \begin{matrix} b1 \ b2 \ b3 \end{matrix} \right)
z3 \left( \begin{matrix} c1 \ c2 \ c3 \end{matrix} \right)
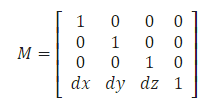
坐标变换 平移 假设在三维空间坐标系中, 点Ai(x, y, z)在x方向移动了dx, y方向移动dy, z方向移动了dz。到达点Aj(X, Y, Z), 则
1 2 3 X = x + dx Y = y + dy Z = z + dz
如上所述, 则存在一个平移矩阵M,使得AiM=Aj,但是在纯粹的三维矩阵中,我们永远也找不到这样一个矩阵M使条件成立。此时可以借助齐次坐标。齐次坐标规定用一个n+1维度的向量来表示原来的n维向量. 此时将Ai(x, y, z) 表示为(x, y, z, 1), 则可以得到矩阵M
验证: 假设Ai(4, 8, 2), x方向移动了dx, y方向移动dy, z方向移动了dz, 则Aj(4+dx, 8+dy , 2+dz)
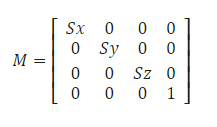
缩放 假设在三维空间坐标系中, 点Ai(x, y, z)在x方向缩放了Sx, y方向缩放了Sy, z方向缩放了Sz。到达点Aj(X, Y, Z), 则
1 2 3 X = x * Sx Y = y * Sy Z = z * Sz
同理,缩放矩阵为
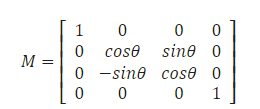
旋转 矩阵的旋转比较复杂,需要涉及到三角函数。 点Ai(x, y, z)绕X轴旋转θ度时, 到达点Aj(X, Y, Z), 则
1 2 3 X = X Y = y*cosθ - y*sinθ z = z*sinθ + z*cosθ
矩阵M为
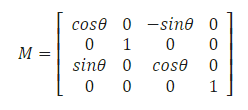
绕Y轴旋转时
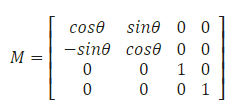
绕Z轴旋转时
欧拉变换是绕3个旋转轴的旋转矩阵的乘积
Open3D示例 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 import numpy as npimport open3d as o3dimport copyvec = np.identity(4 ) vec[0 ][0 ] = 2 vec[1 ][1 ] = 2 vec[2 ][2 ] = 2 print (vec)mbody = '/home/simon/tf_demo/vton3d/3dface/Align/data/hello_smpl_stand_new.ply' mface = '/home/simon/tf_demo/vton3d/3dface/Align/data/mx_new.ply' mmbody = o3d.io.read_triangle_mesh(mbody) mesh_face = o3d.io.read_triangle_mesh(mface) mmface = o3d.geometry.Geometry3D.transform(mesh_face, vec) print (mmface)o3d.visualization.draw_geometries([mmface, mmbody])
问题:给定两个坐标,如何计算变换矩阵?
webgl示例分析 在webgl中, 在矩阵变换常用的库glmatrix 中有计算平移矩阵的translate 方法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 /** * Translate a mat4 by the given vector * * @param {mat4} out the receiving matrix * @param {mat4} a the matrix to translate * @param {vec3} v vector to translate by * @returns {mat4} out */ function translate(out, a, v) { var x = v[0], y = v[1], z = v[2]; var a00 = void 0, a01 = void 0, a02 = void 0, a03 = void 0; var a10 = void 0, a11 = void 0, a12 = void 0, a13 = void 0; var a20 = void 0, a21 = void 0, a22 = void 0, a23 = void 0; if (a === out) { out[12] = a[0] * x + a[4] * y + a[8] * z + a[12]; out[13] = a[1] * x + a[5] * y + a[9] * z + a[13]; out[14] = a[2] * x + a[6] * y + a[10] * z + a[14]; out[15] = a[3] * x + a[7] * y + a[11] * z + a[15]; } else { a00 = a[0];a01 = a[1];a02 = a[2];a03 = a[3]; a10 = a[4];a11 = a[5];a12 = a[6];a13 = a[7]; a20 = a[8];a21 = a[9];a22 = a[10];a23 = a[11]; out[0] = a00;out[1] = a01;out[2] = a02;out[3] = a03; out[4] = a10;out[5] = a11;out[6] = a12;out[7] = a13; out[8] = a20;out[9] = a21;out[10] = a22;out[11] = a23; out[12] = a00 * x + a10 * y + a20 * z + a[12]; out[13] = a01 * x + a11 * y + a21 * z + a[13]; out[14] = a02 * x + a12 * y + a22 * z + a[14]; out[15] = a03 * x + a13 * y + a23 * z + a[15]; } return out; } 复制代码
通常使用translate方法来创建一个平移矩阵, 之后再shader中便可以通过这个平移矩阵来计算gl_Position的值。 通过上面的结果我们知道平移矩阵由最后四位数决定, 所以只需要计算数组的最后四位数即可。 根据矩阵的运算法则, 即可得到结果。
通常如果在webgl想创建一个平移矩阵, 可以使用下面的方式。
1 2 3 var translateMatrix = mat4.create(); //创建单位矩阵 mat4.translate(translateMatrix, translateMatrix, vec3.fromValues(dx, dy, dz)); 复制代码
得到平移矩阵后,传递到顶点shader中与需要计算的点相乘即可得到目标点的坐标。
ref 人脸姿态估计(计算欧拉角)-CSDN博客