[TOC]
单目跟踪算法:
- 产生式
- 鉴别式
- 基于相关滤波
- 基于深度学习
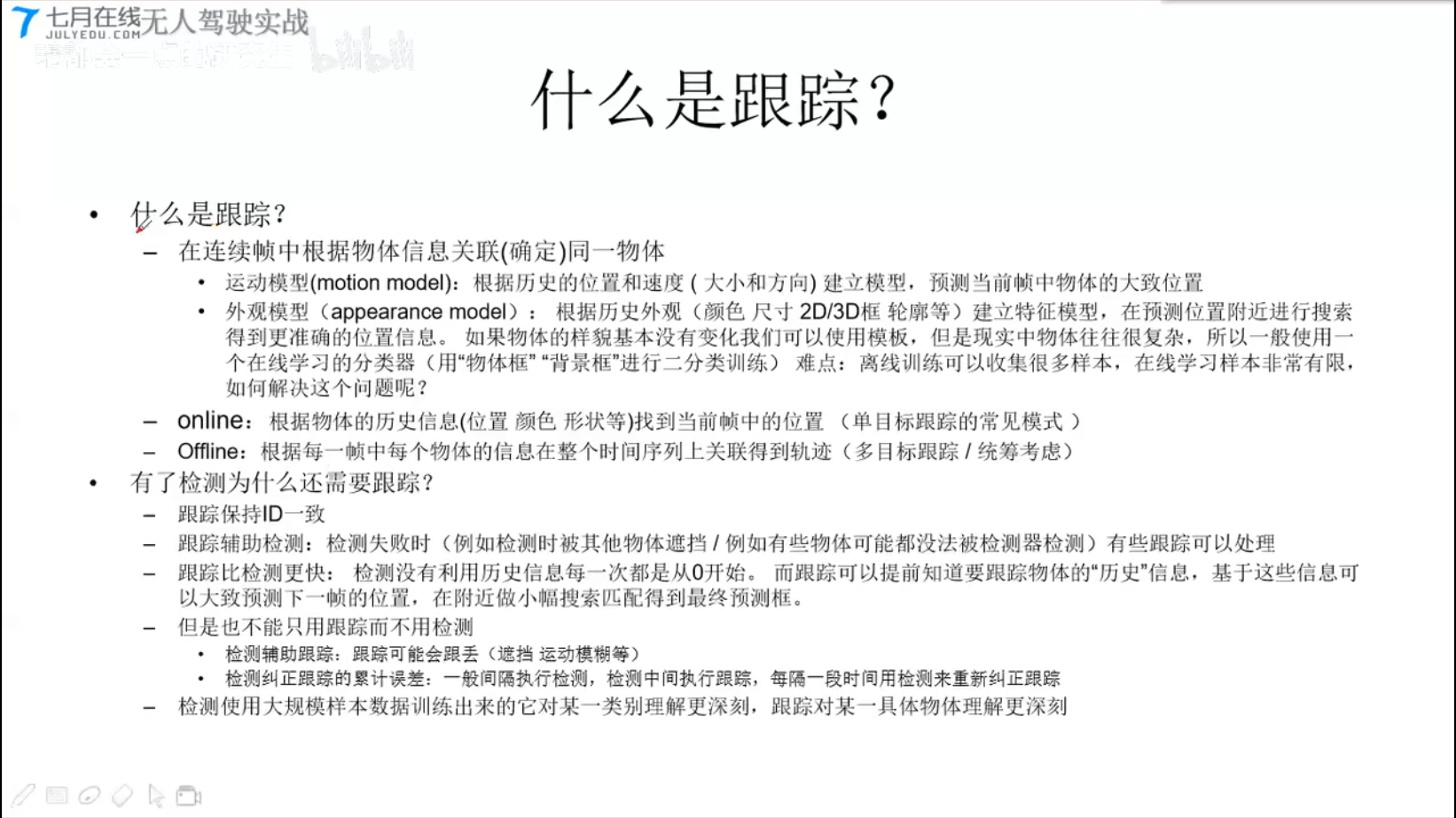
6.1 什么是跟踪?
6.2 单目标跟踪
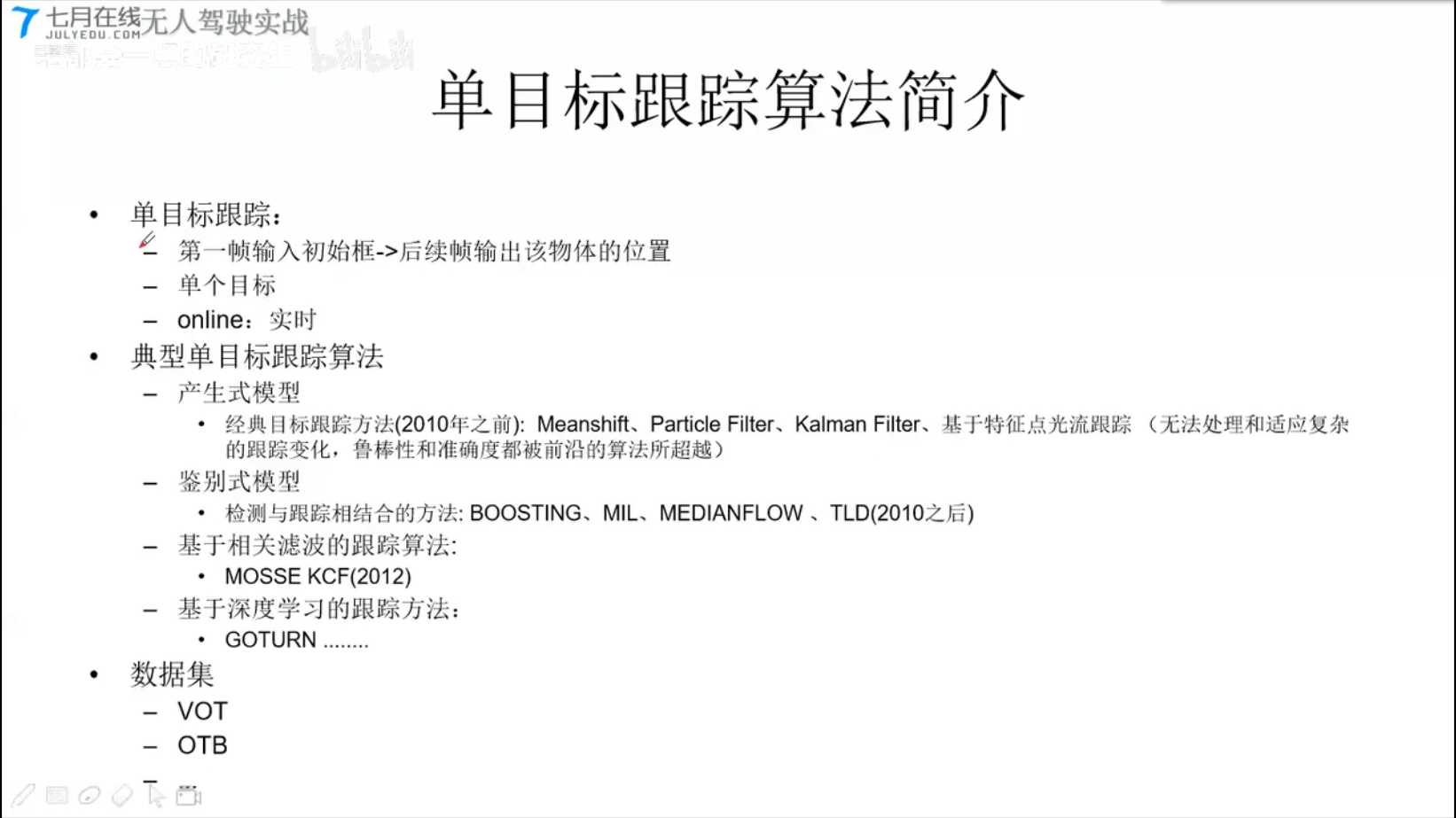
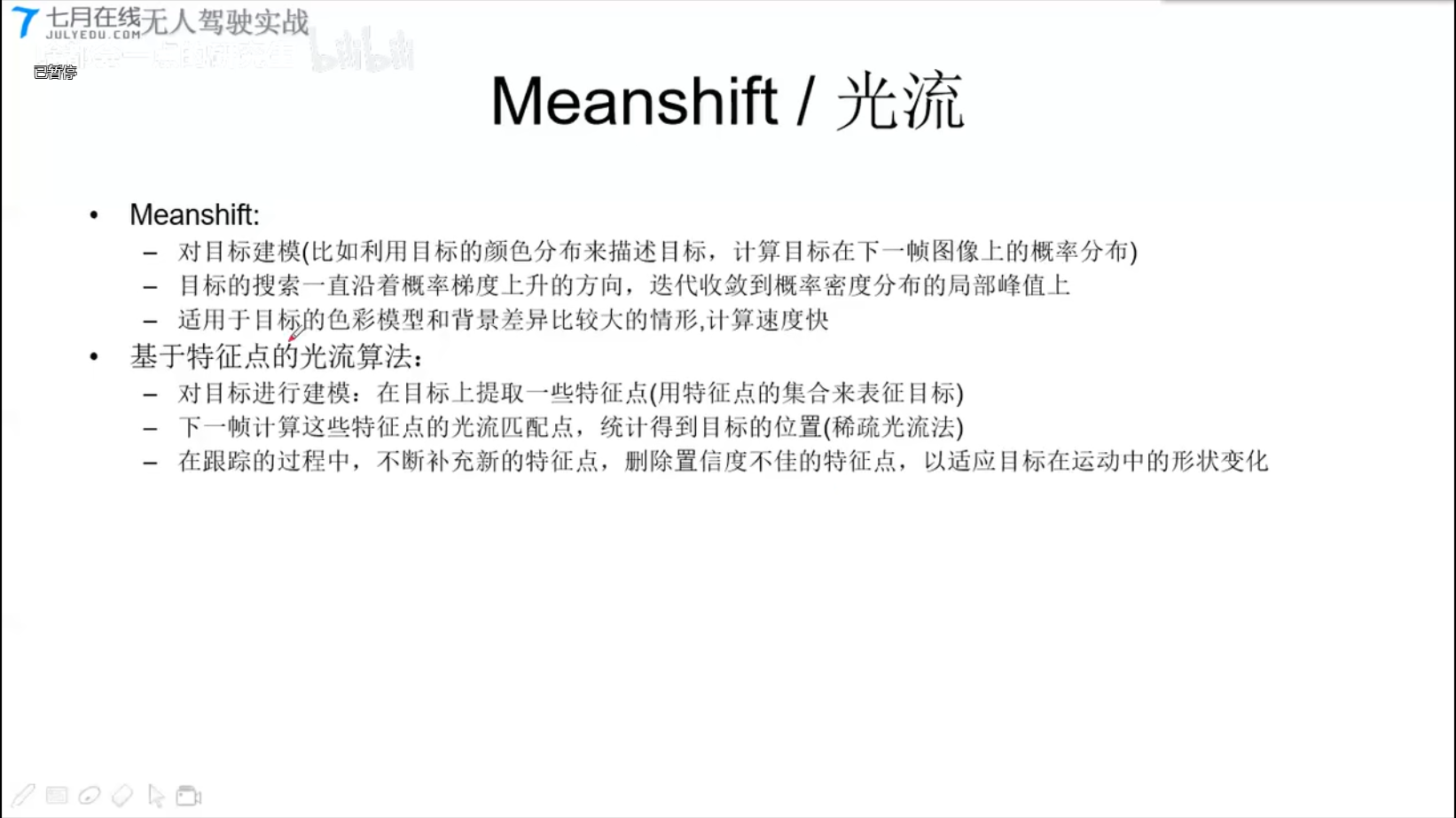
6.2.1 单目标跟踪-产生式模型
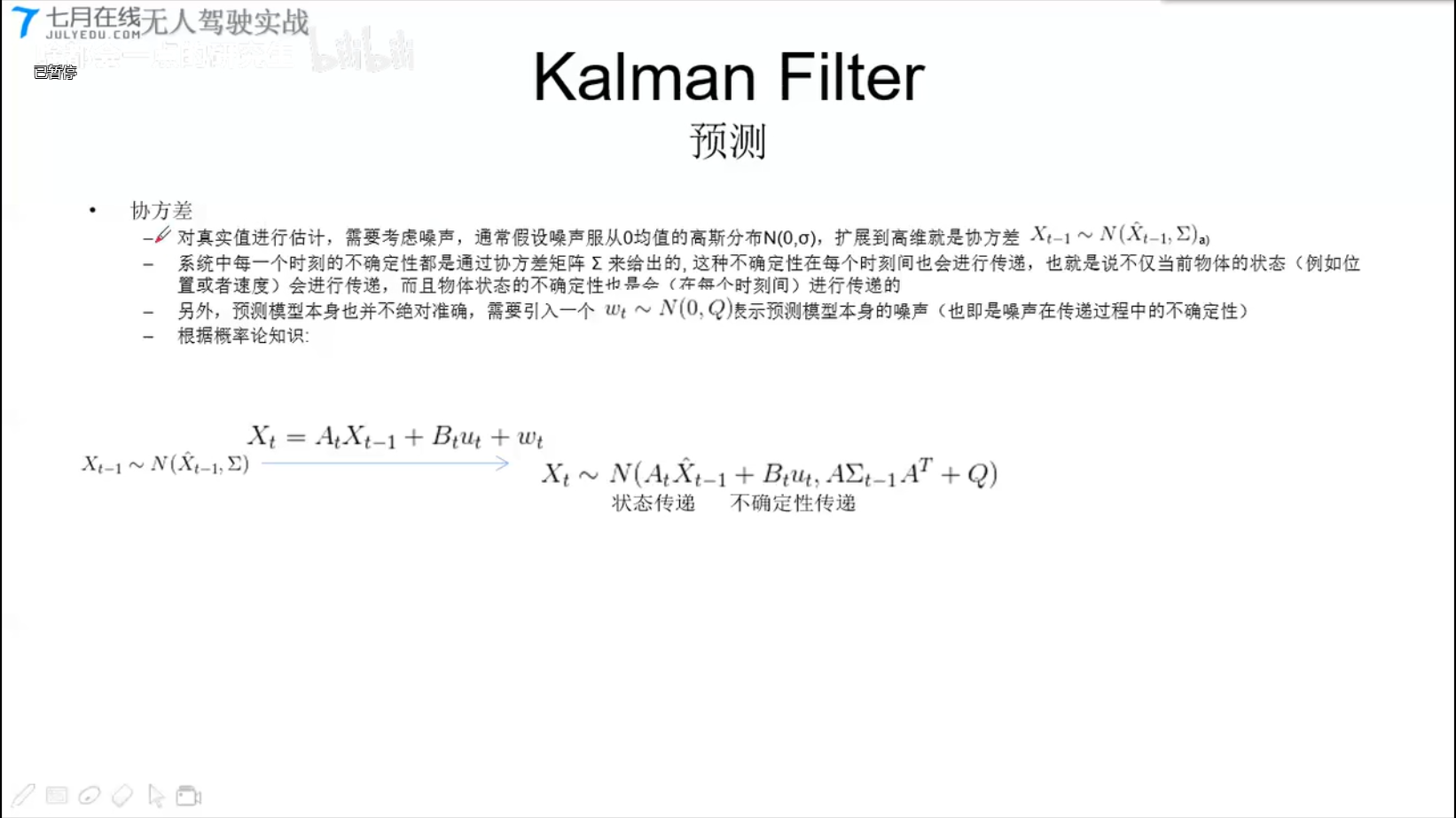
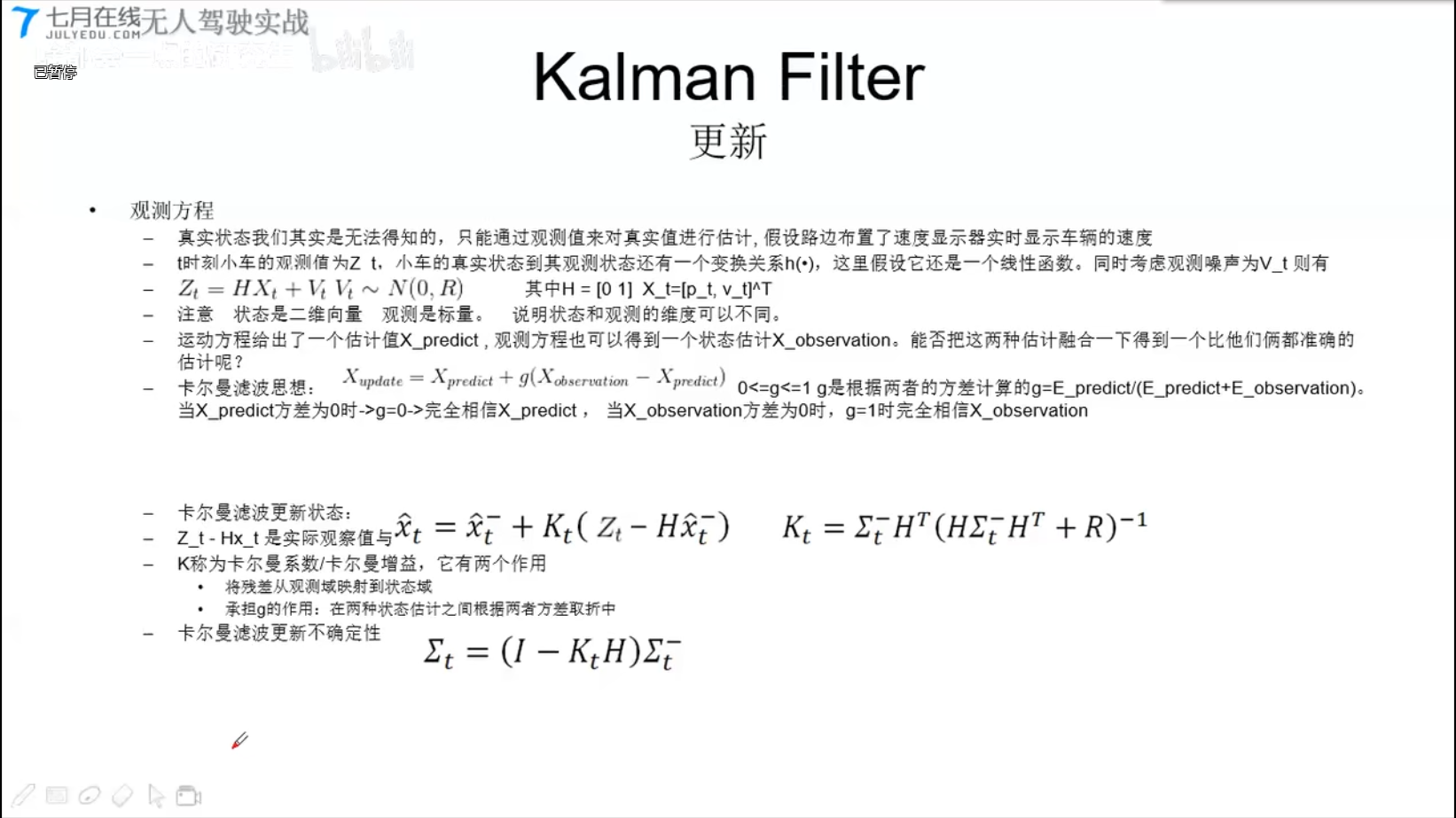
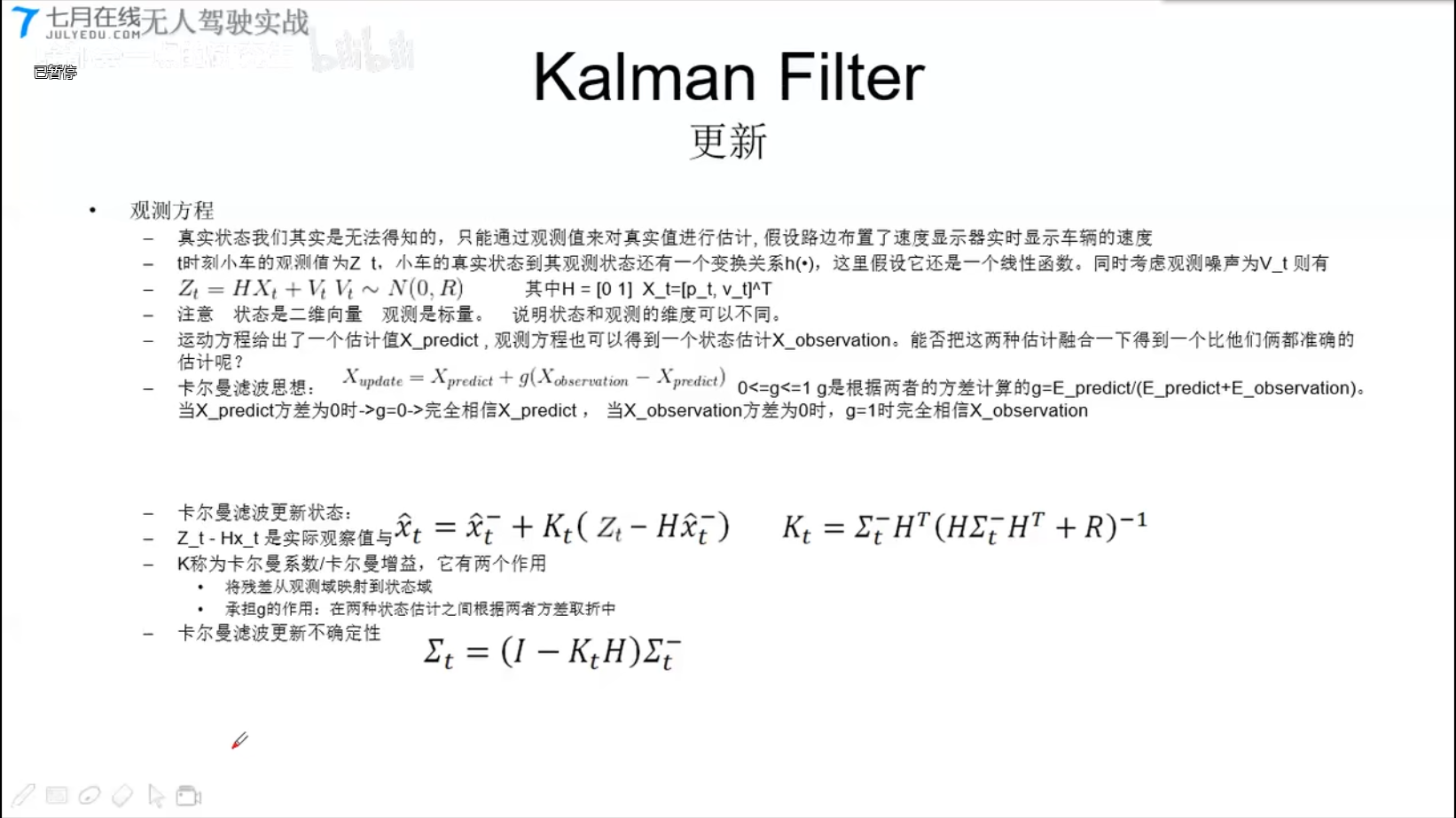
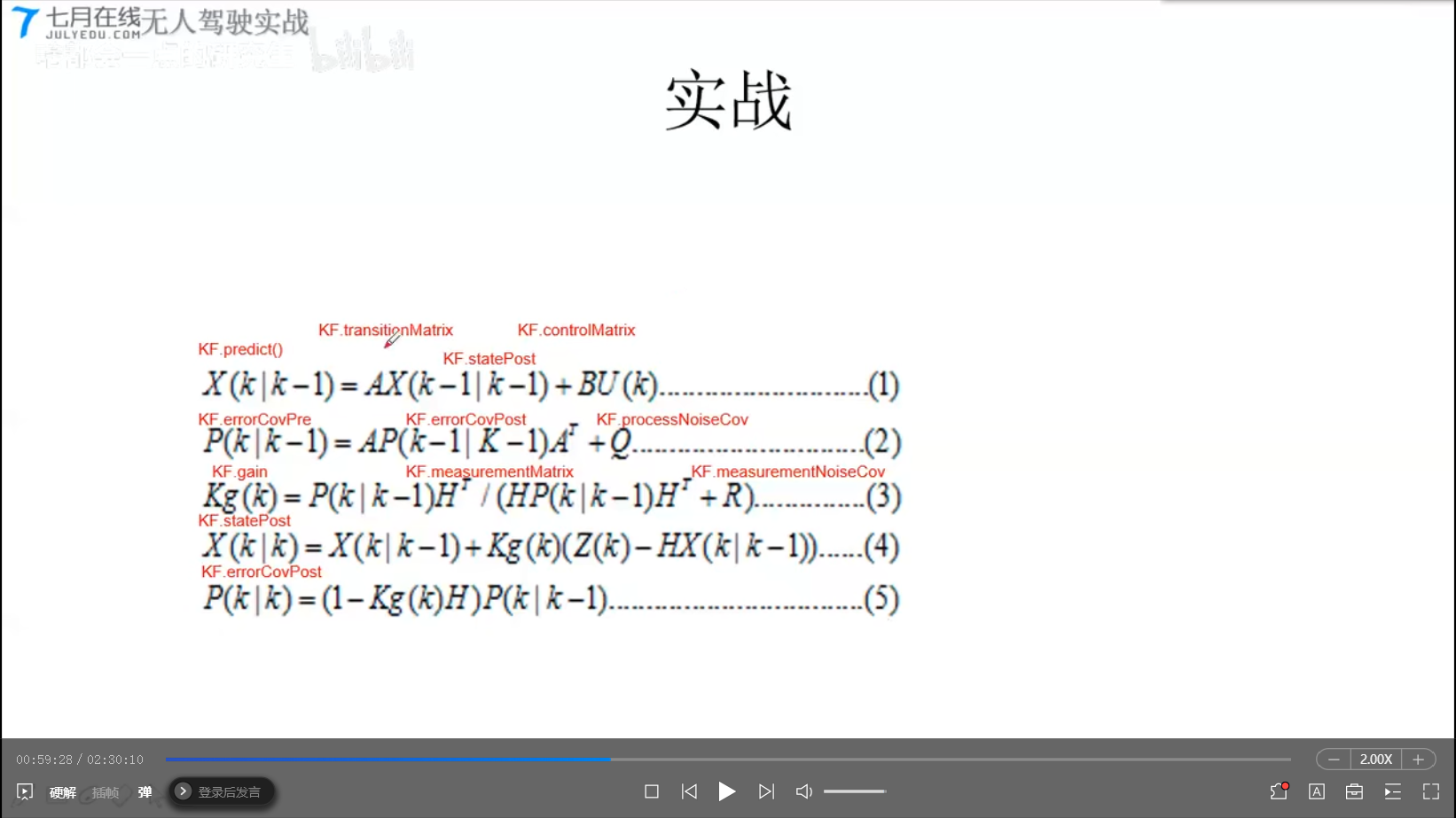
Kalman Filter
code: https://github.com/andylei77/kalman_particle_demo
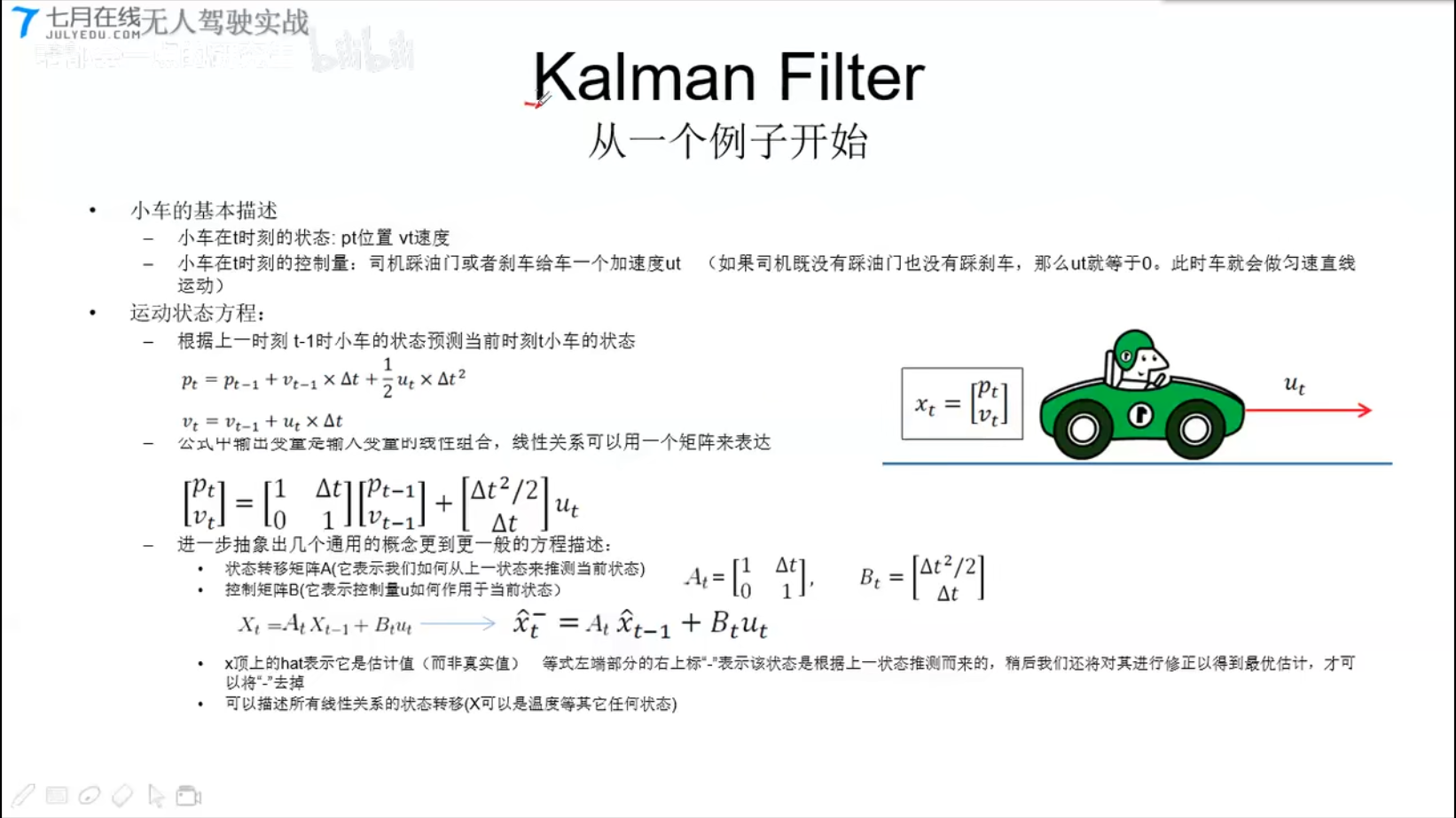
N(均值,协方差)
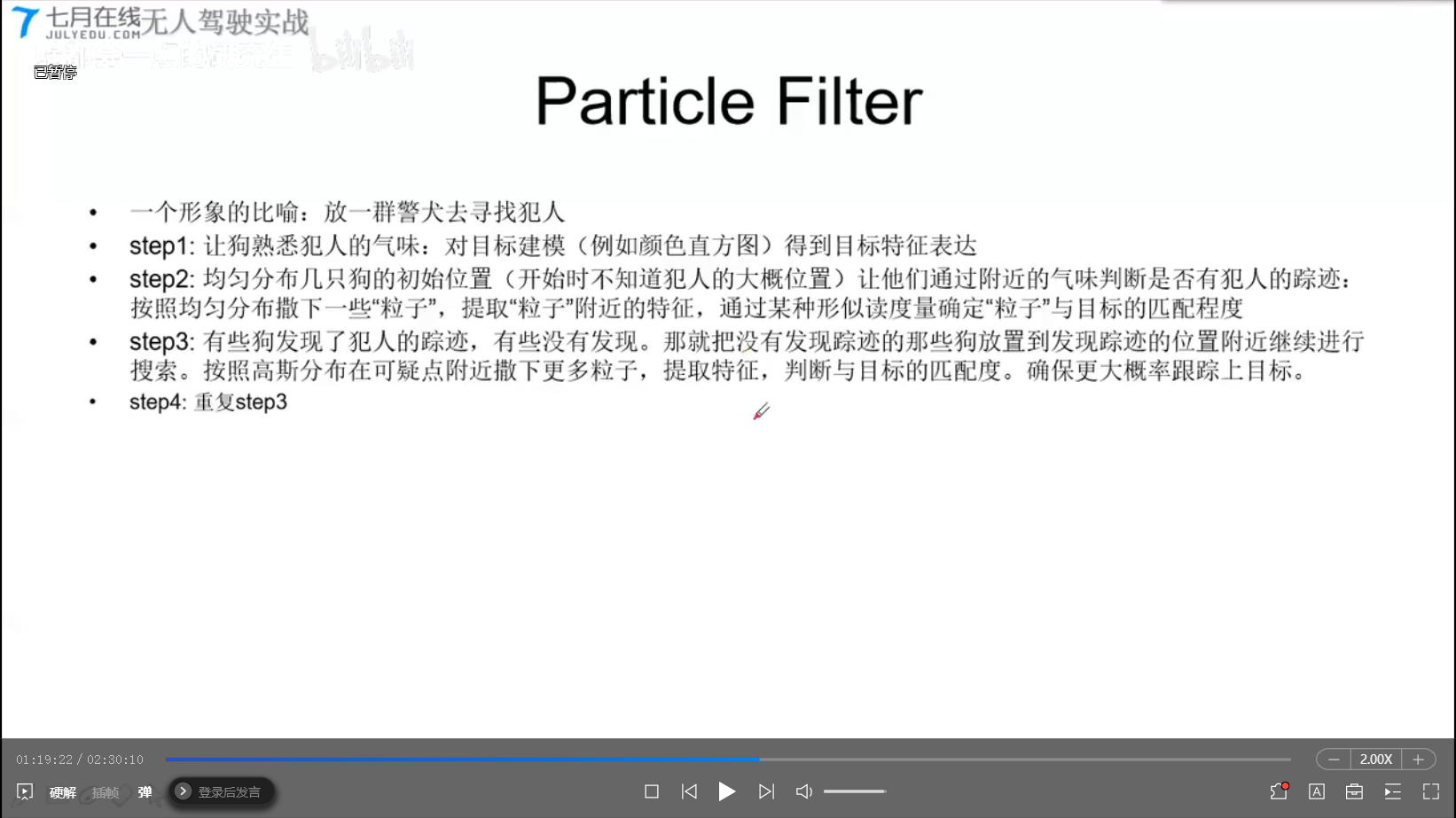
Particle Filter
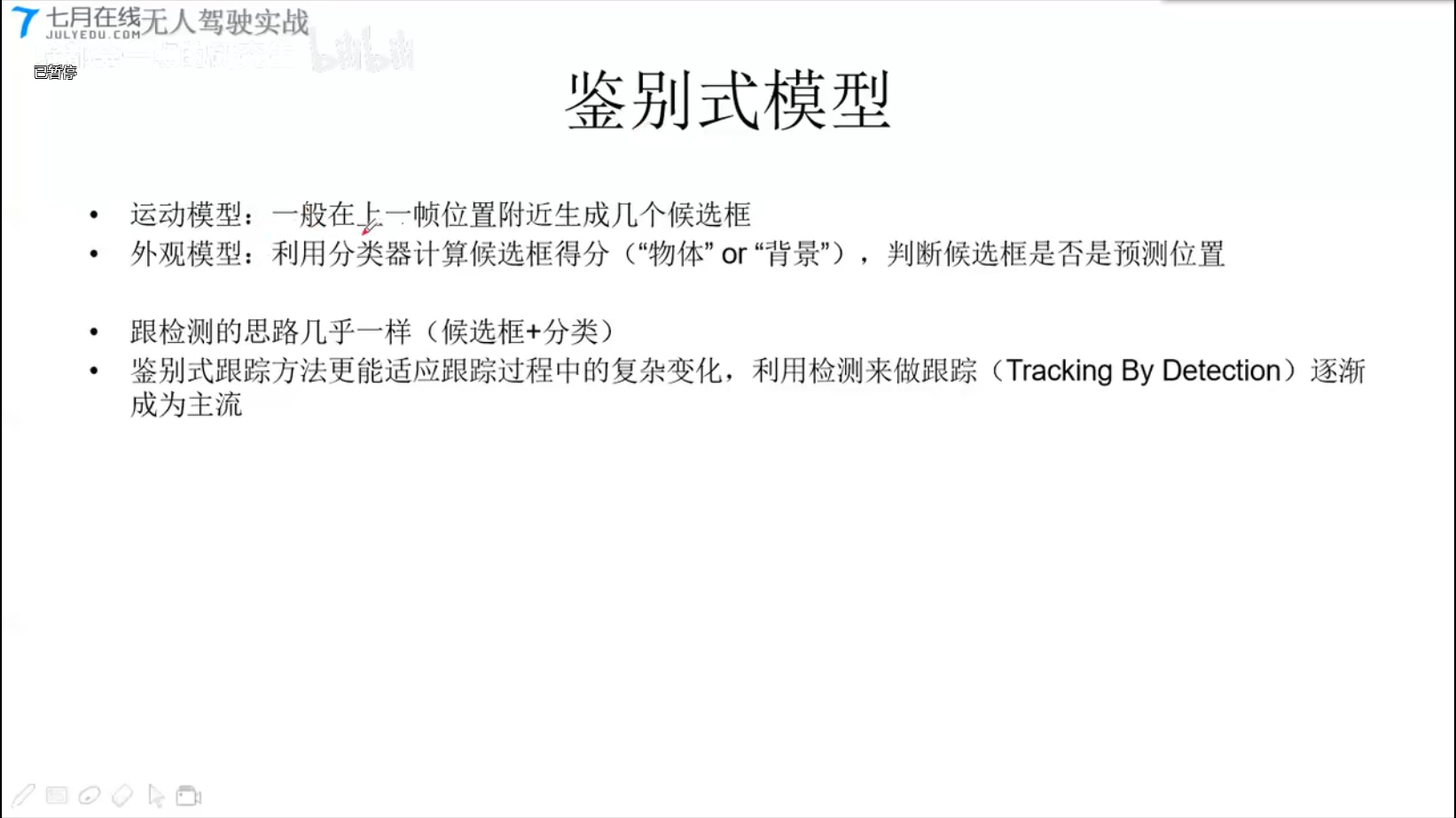
6.2.2 单目标跟踪-鉴别式模型
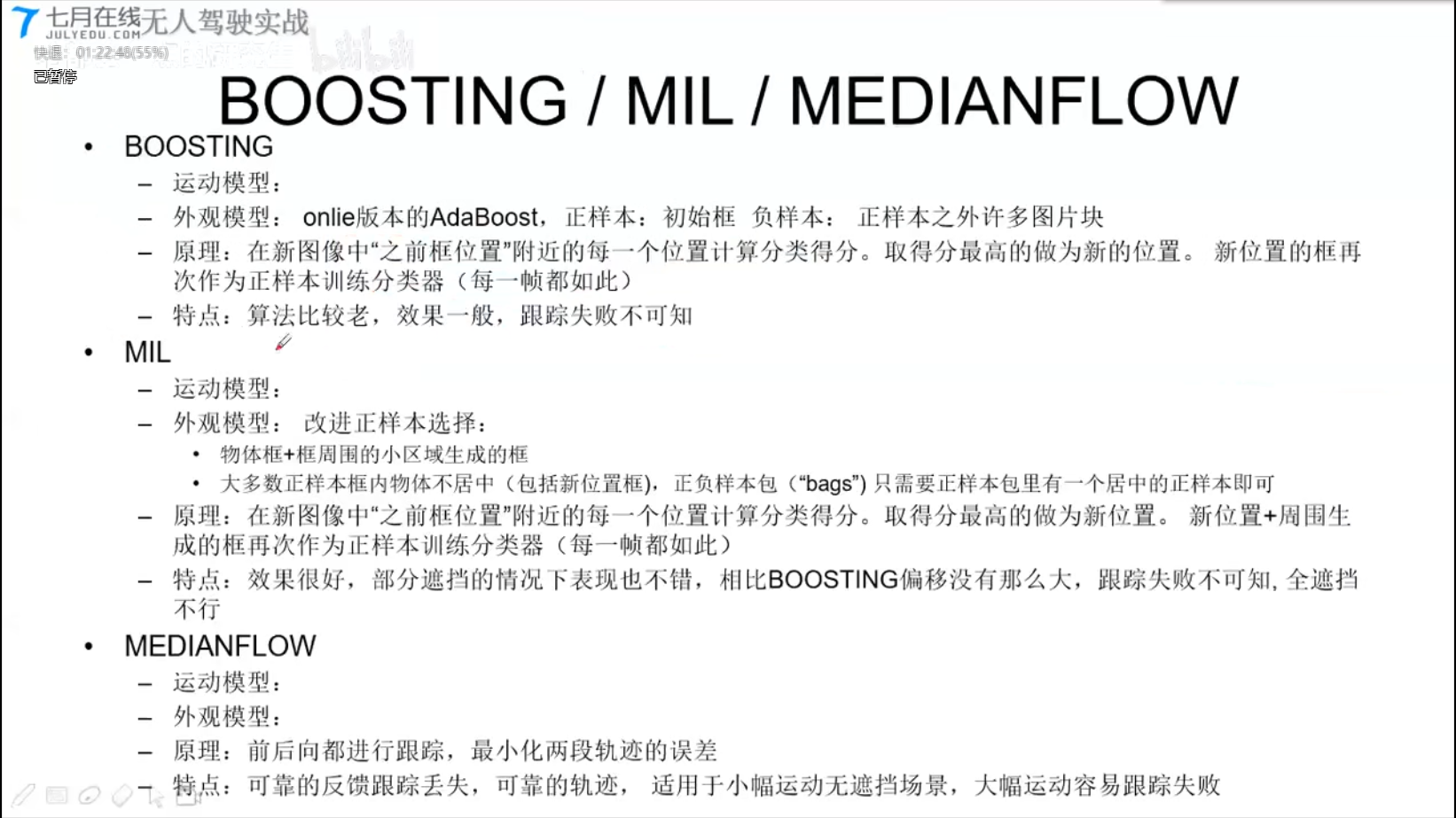
Boosting
MIL
MEDIANFLOW
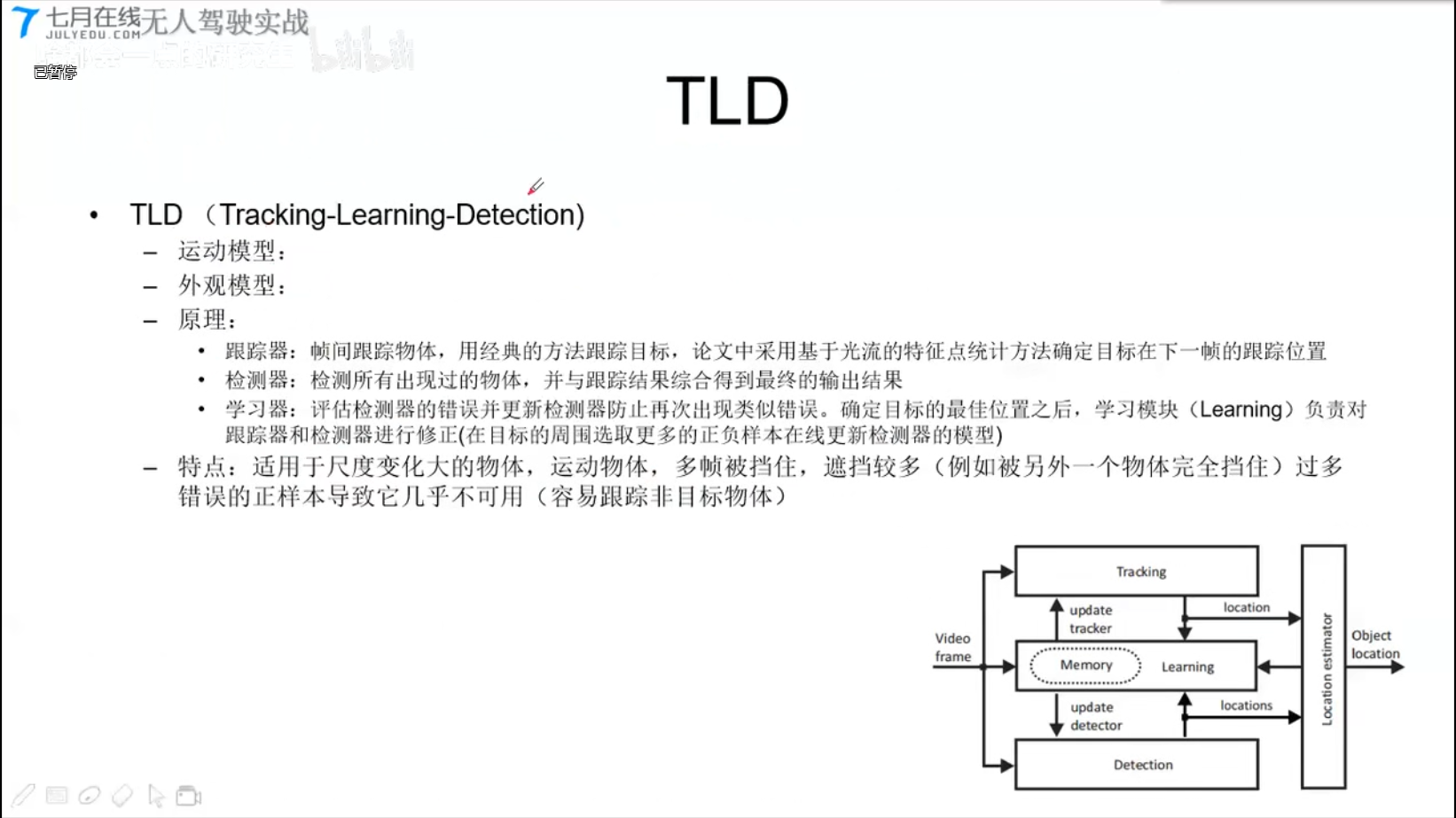
TLD
- 跟踪器: 光流
- 检测器:
OPENCV API
code: https://github.com/andylei77/learnopencv/tree/master/tracking
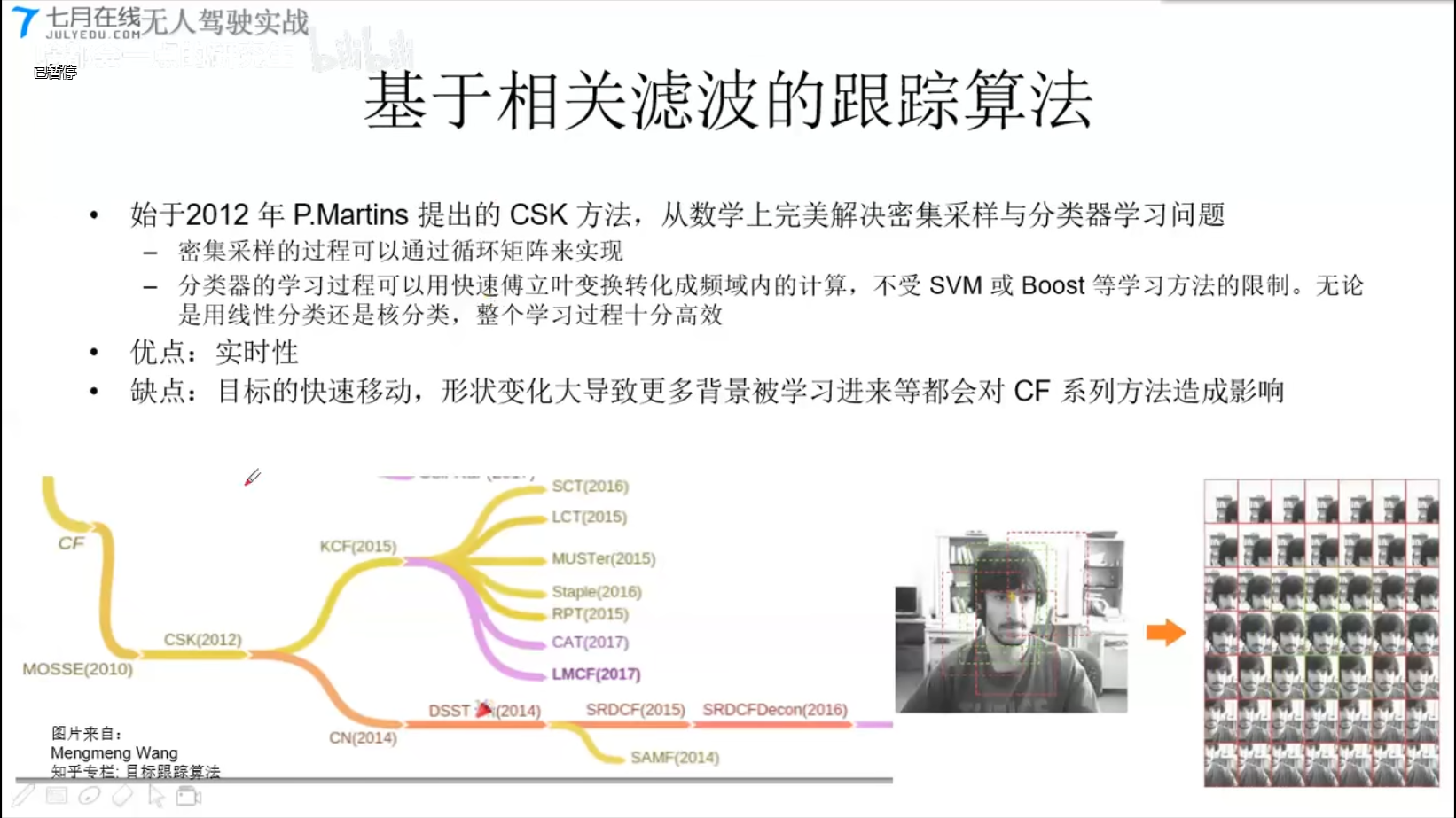
6.2.3 单目标跟踪-基于相关滤波算法
-
- MOSSE 评价相似性的滤波算法
CSK
- CSK方法
- 密集采样,通过循环矩阵来实现
- 分类器的学习通过快速傅里叶变换成频域内的计算,不受SVM或Boost等学习方法的限制(什么限制??)。无论线性分类还是核分类,整个学习过程十分高效。
- 实时性好
MOSSE
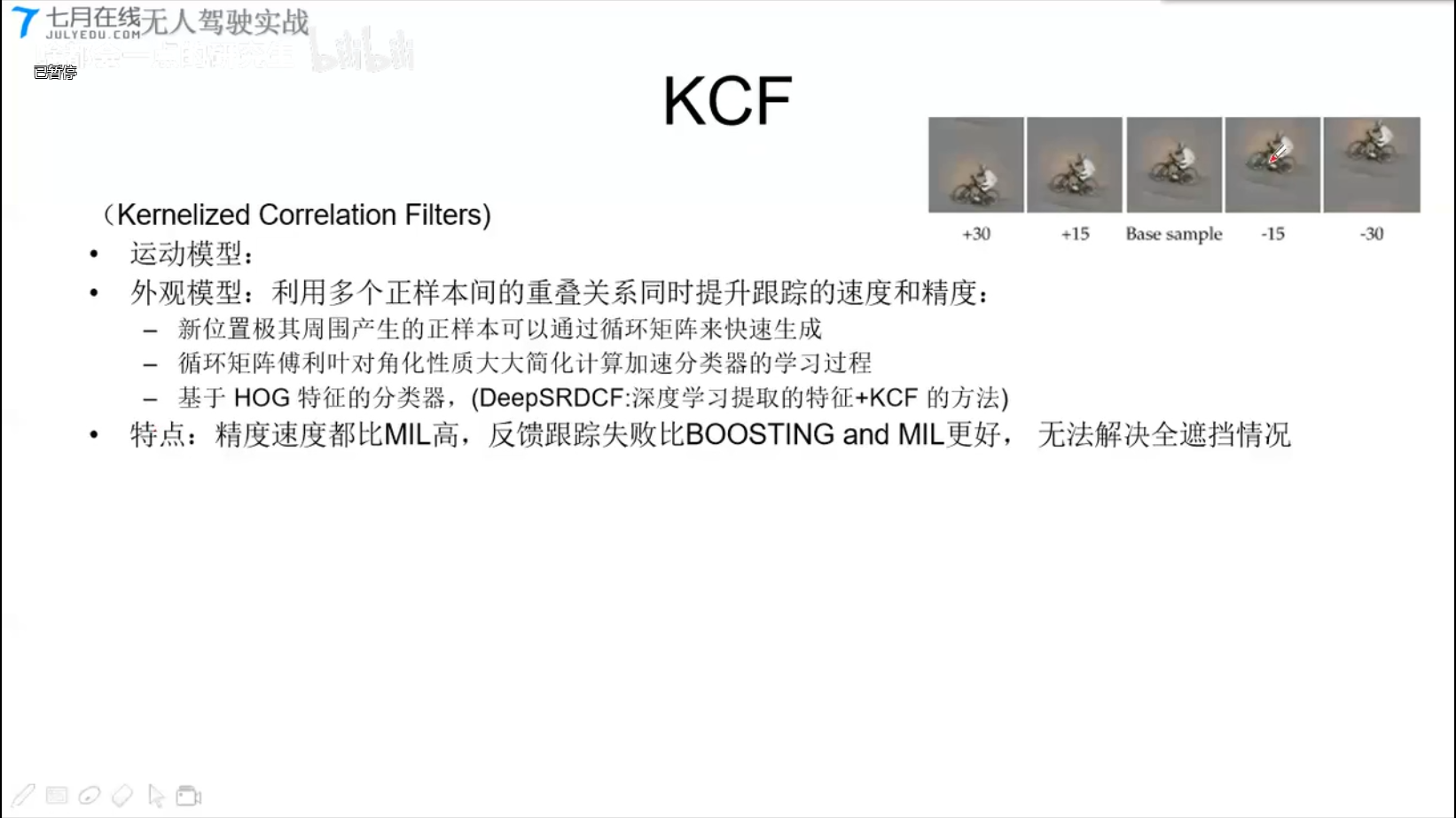
KCF
- 循环矩阵
- 循环矩阵傅里叶对角化性质–简化计算加速分类器的学习过程
- 基于HOG特征的分类器(DeepSRDCF:深度学习提取的特征+KCF方法)
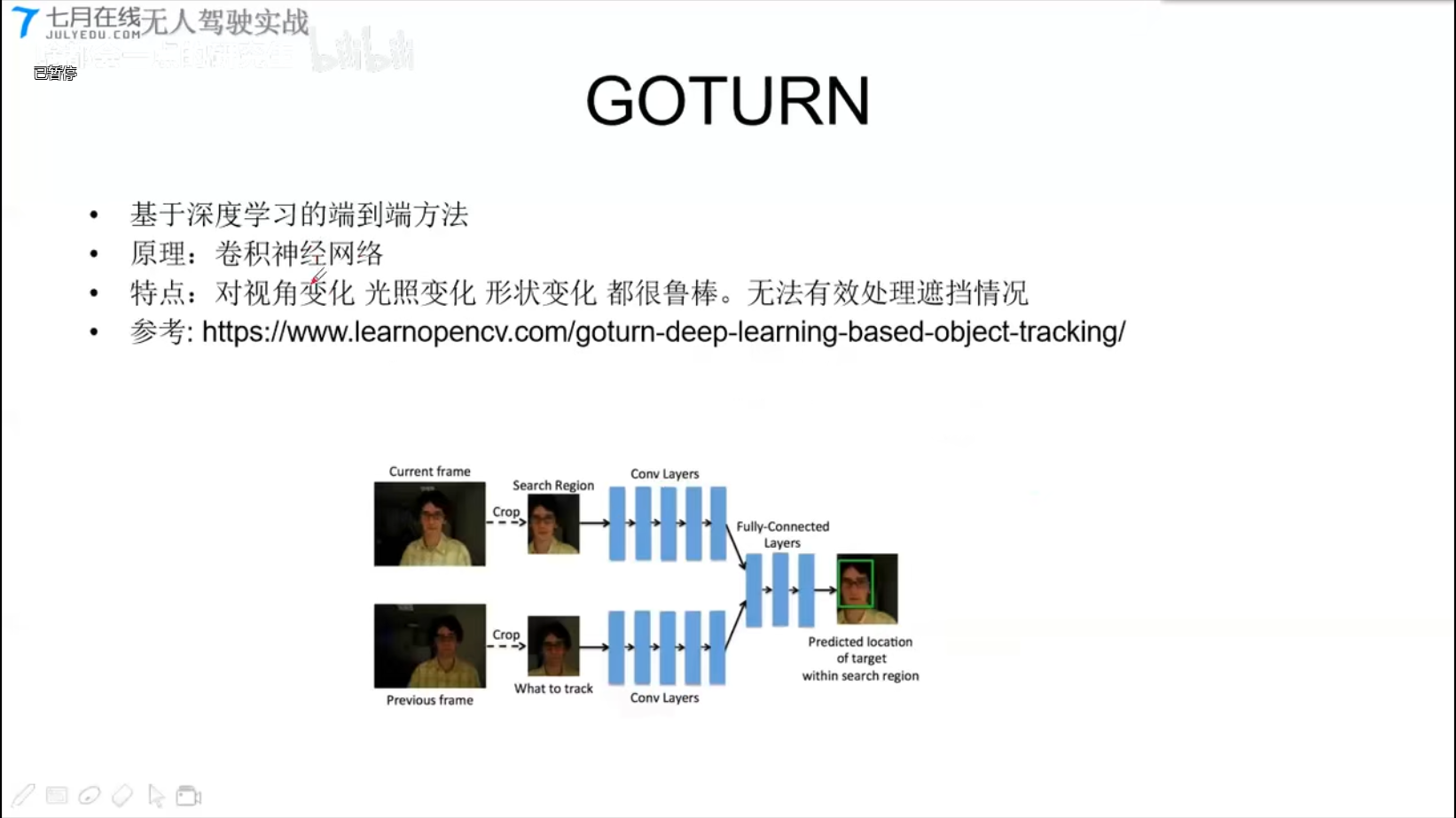
GOTURN (深度学习)
https://www.learnopencv.com/goturn-deep-learning-based-object-tracking/
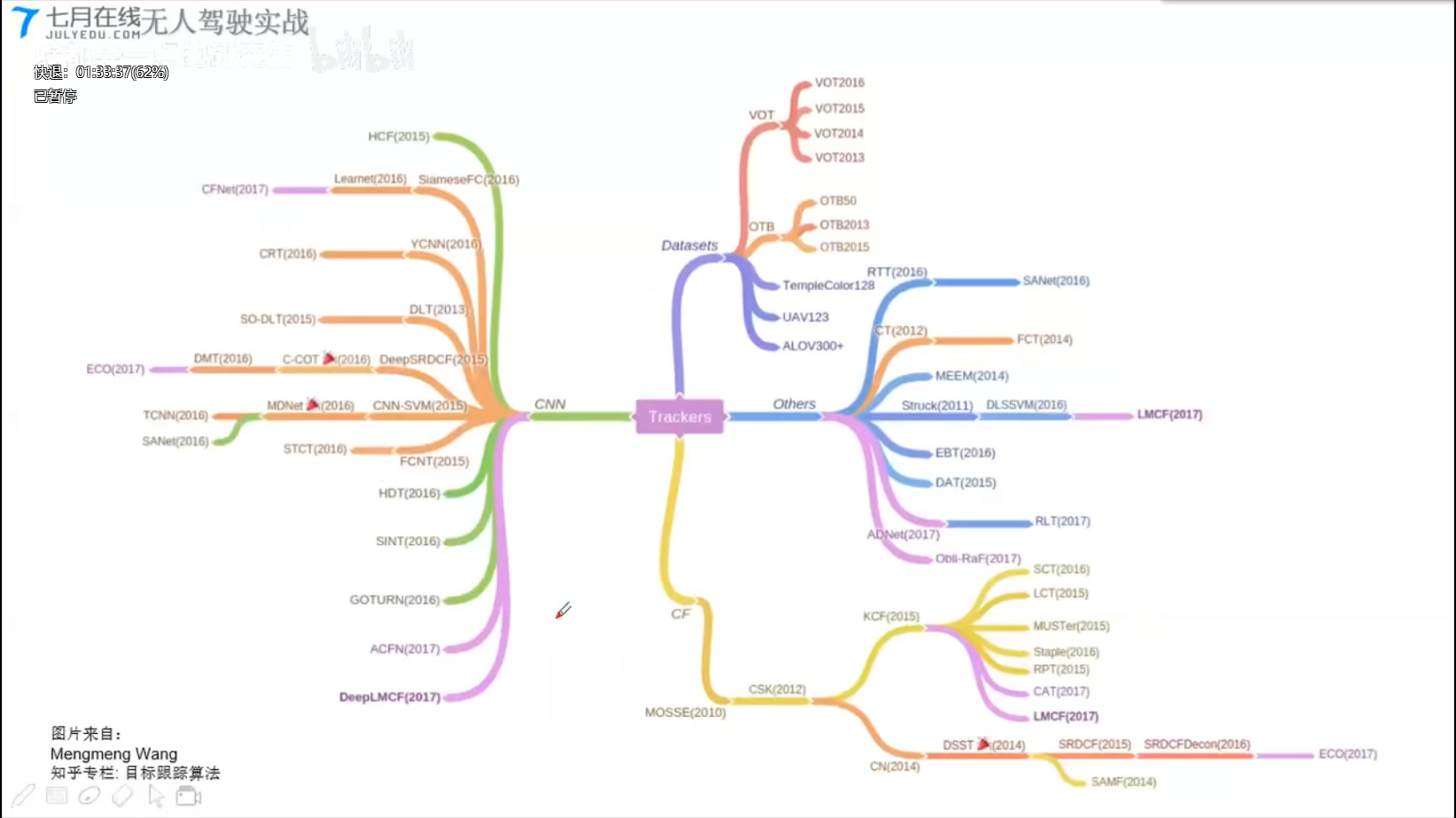
算法综述
数据集;深度学习CNN;CF-相关滤波;其它的
6.3 多目标跟踪
分类方法
- 按照轨迹形成的时间顺序
- 在线
- 离线
- 按照算法机制
- 预测校正 / 关联方式
- 按照算法的数学表示
- 概率统计最大化 / 确定性推导

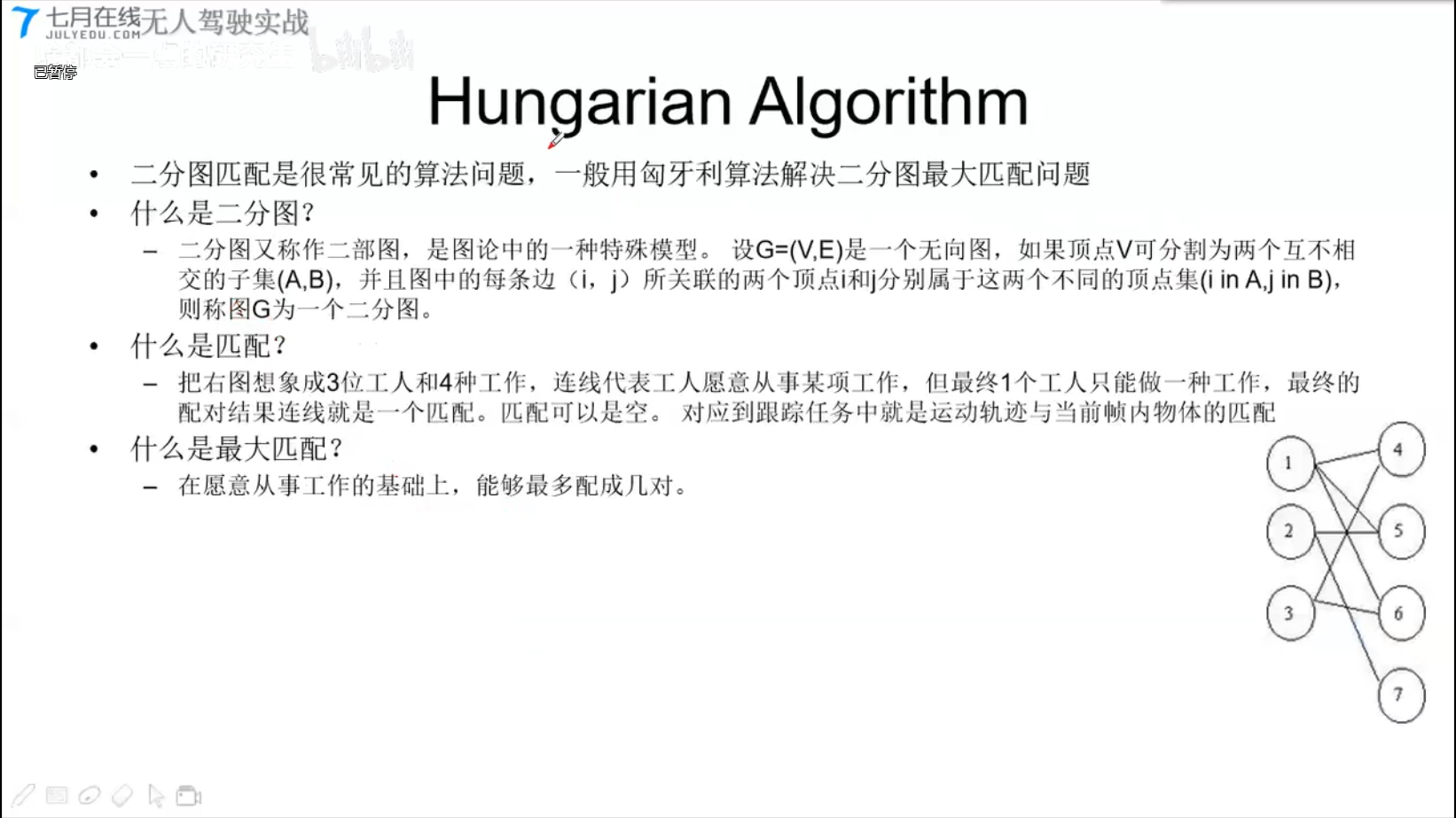
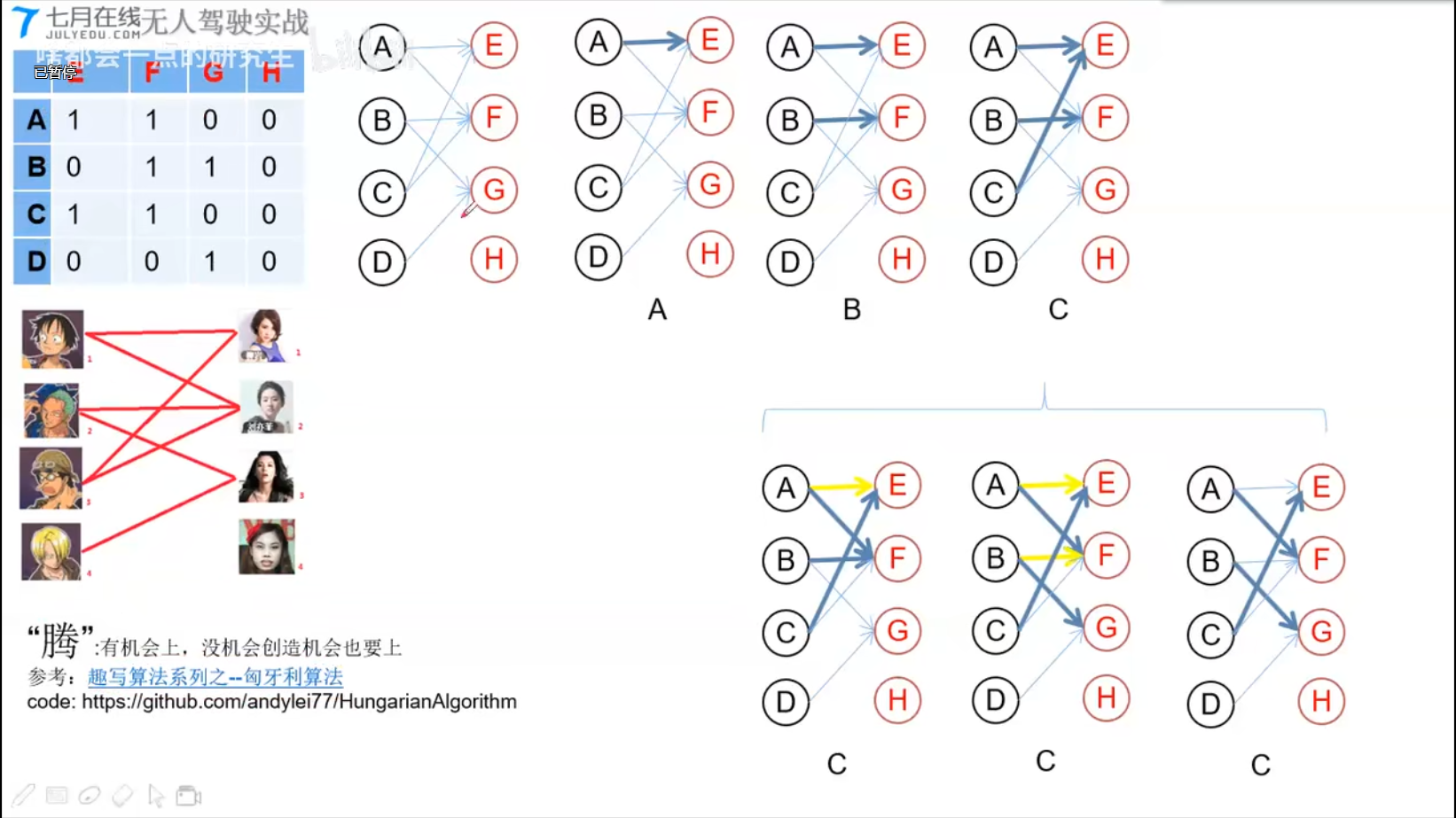
Hungarian Algorithm
https://github.com/andylei77/HungarianAlgorithm
实战
发送端:https://github.com/andylei77/object-detector/tree/ROS
- 基于二分图匹配的多目标跟踪
接受端:https://github.com/andylei77/object-tracker/tree/master/tracker