[TOC]
5.1 基于激光雷达点云的检测算法 (3D检测)
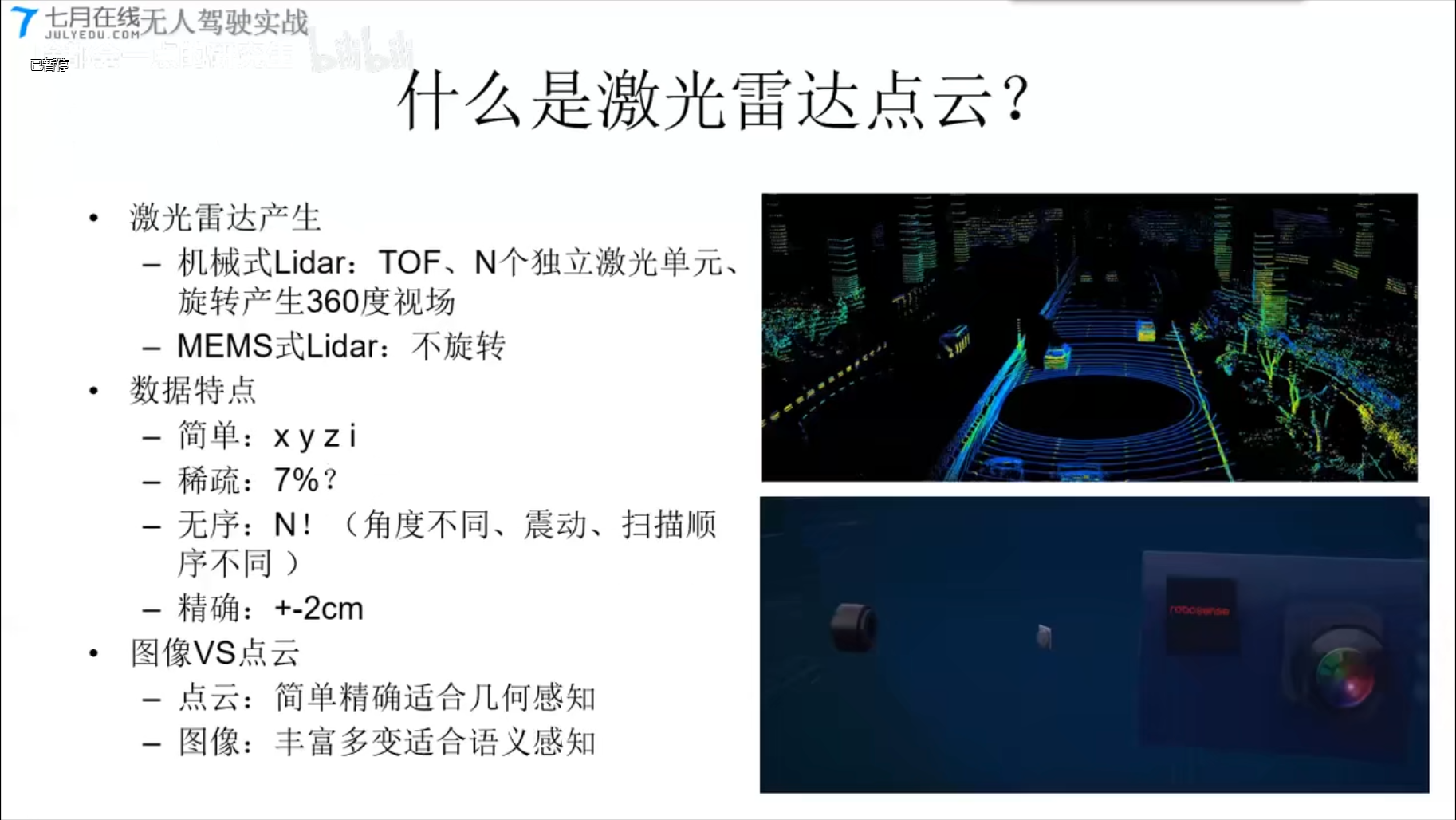
- 激光雷达点云简介
- Pixel-Based
- Voxel-Based
- Tree-Based
- Point-Based
- 实战基于点云的目标检测
0、激光雷达点云简介
什么是激光雷电点云?
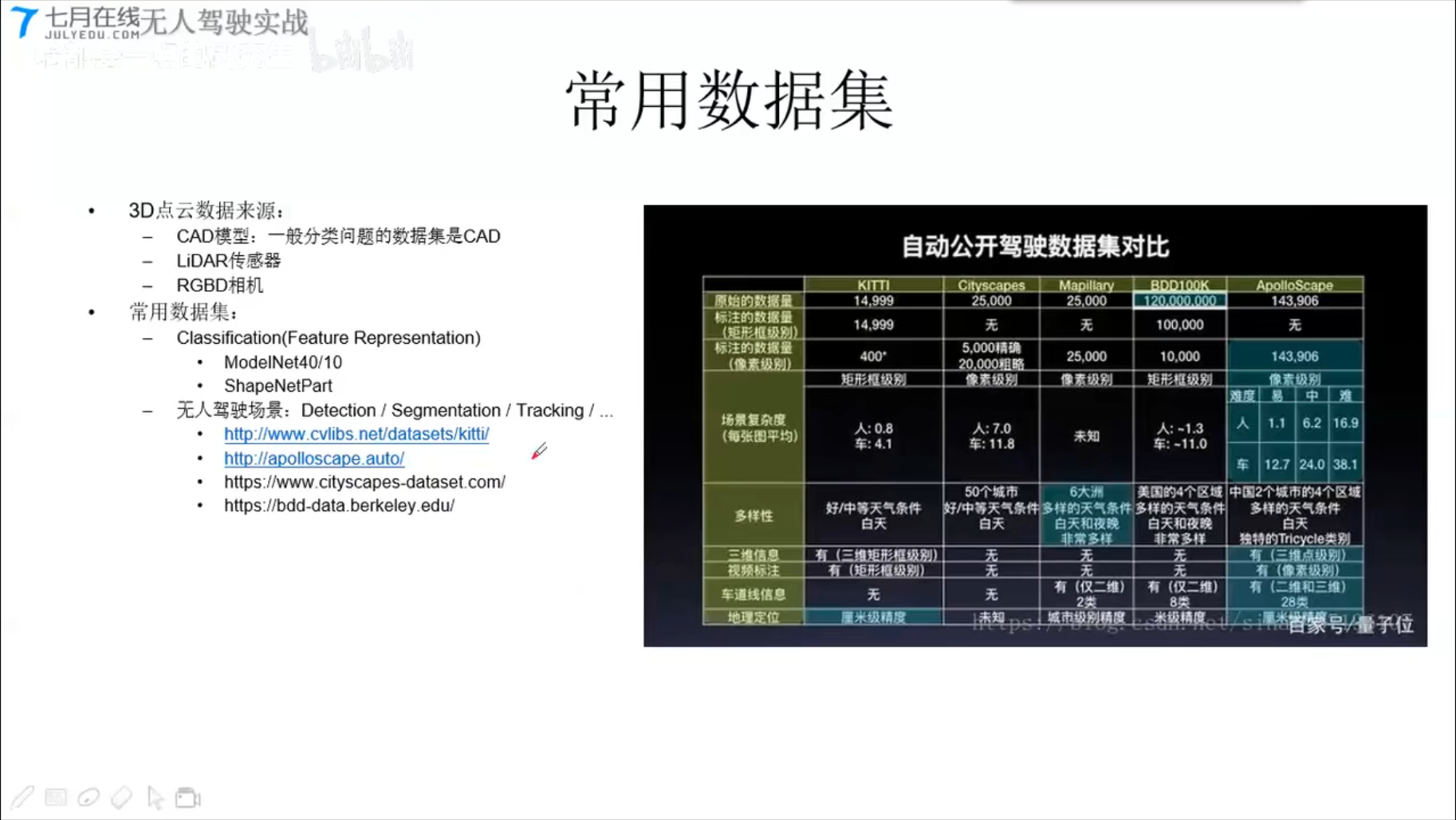
常用数据集
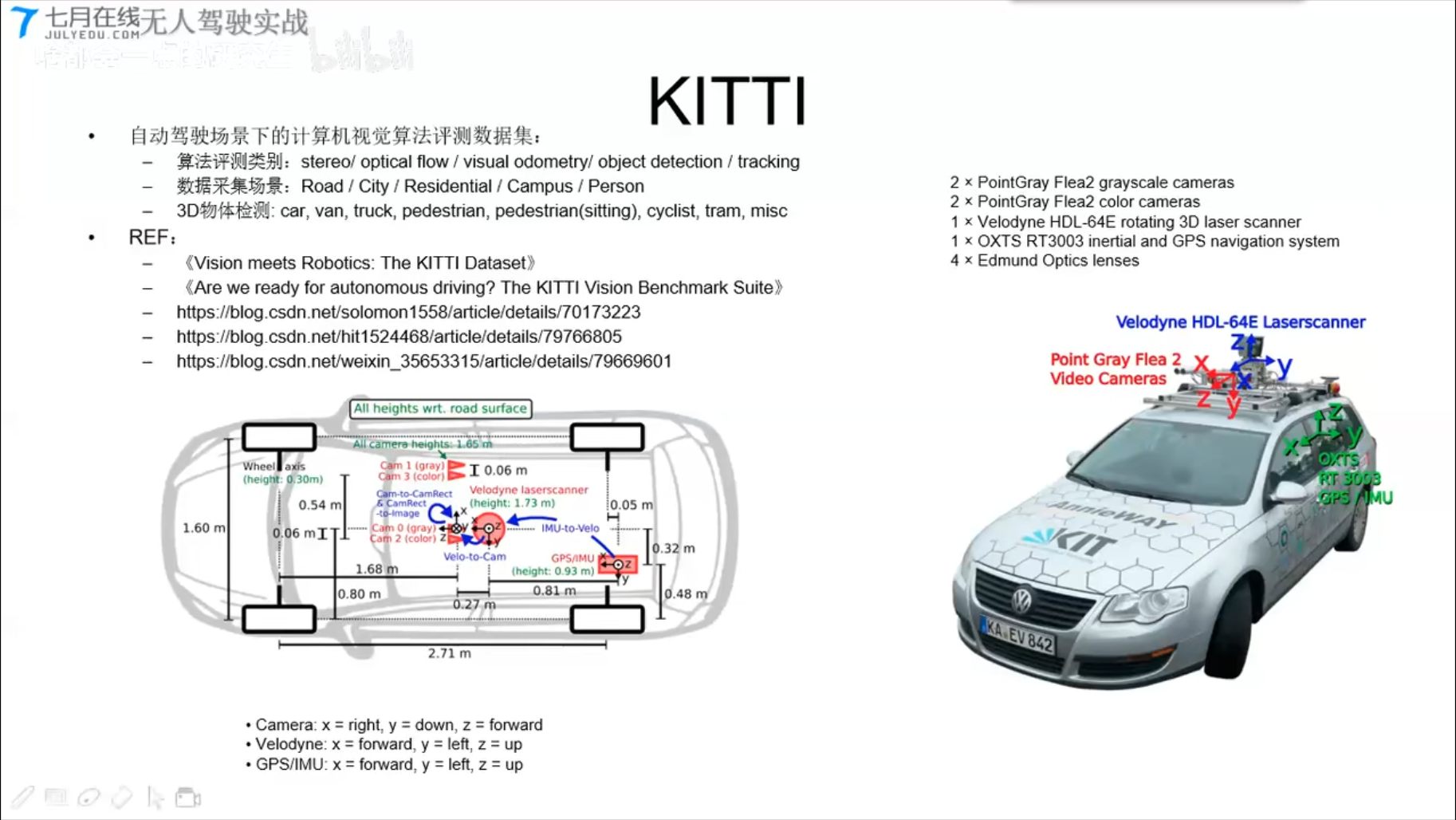
KITTI 实战kitti LIDAR点云生成鸟瞰图BEV
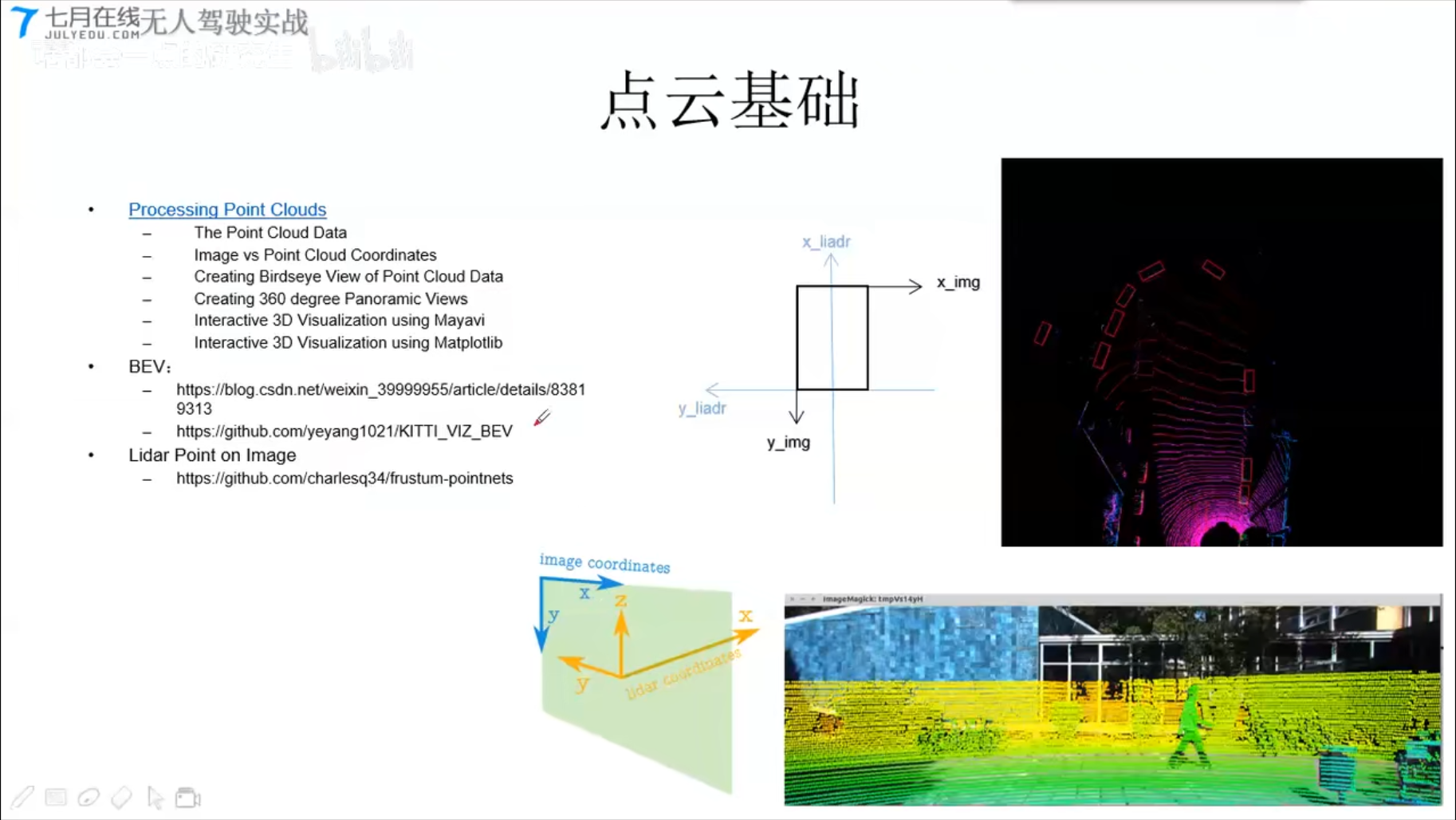
点云基础 - 将点云投影到图片上
- BEV: 俯视图
- Lidar Point on Image
传统VS深度学习
1、基于像素的点云算法(Pixel-Based)
- 基本思想:
- 3D-2D, 三维点云在不同角度的相机投影(映射)
- 再借助2D图像处理领域成熟的深度学习框架进行分析
- 典型算法
- MVCNN, MV3D, AVOD
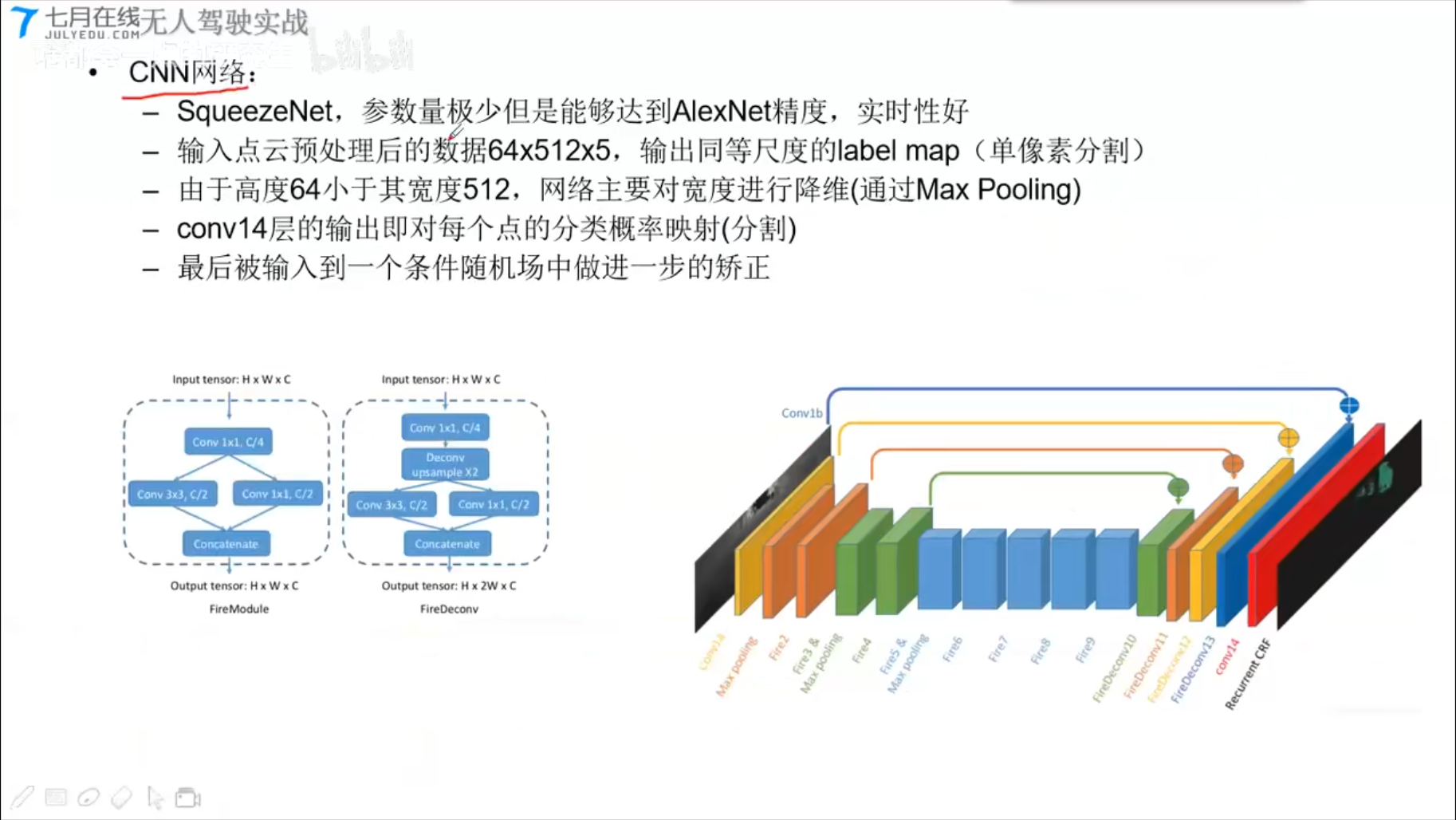
- Apollo2.0 SequeezeSeg
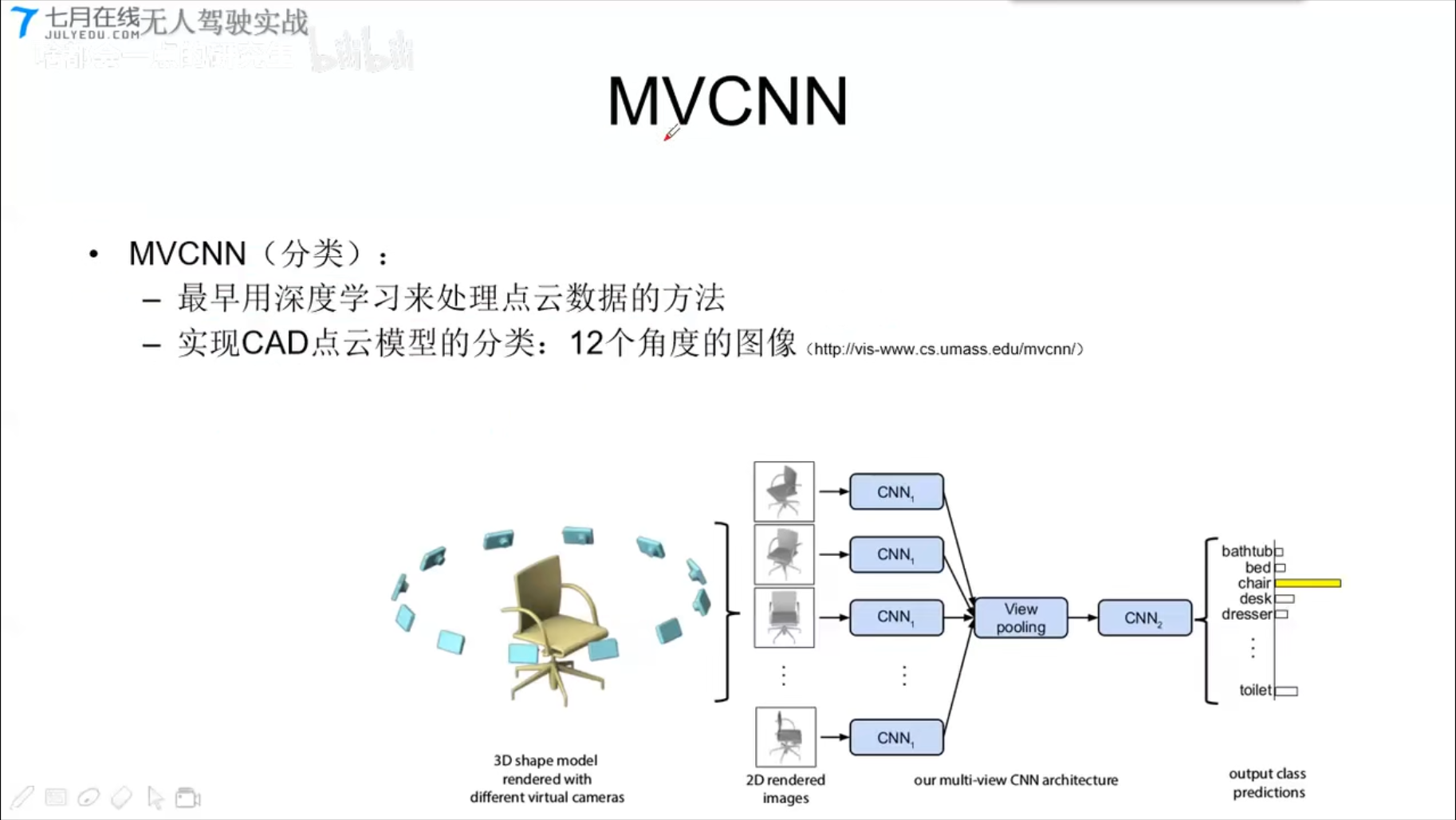
MVCNN (分类)
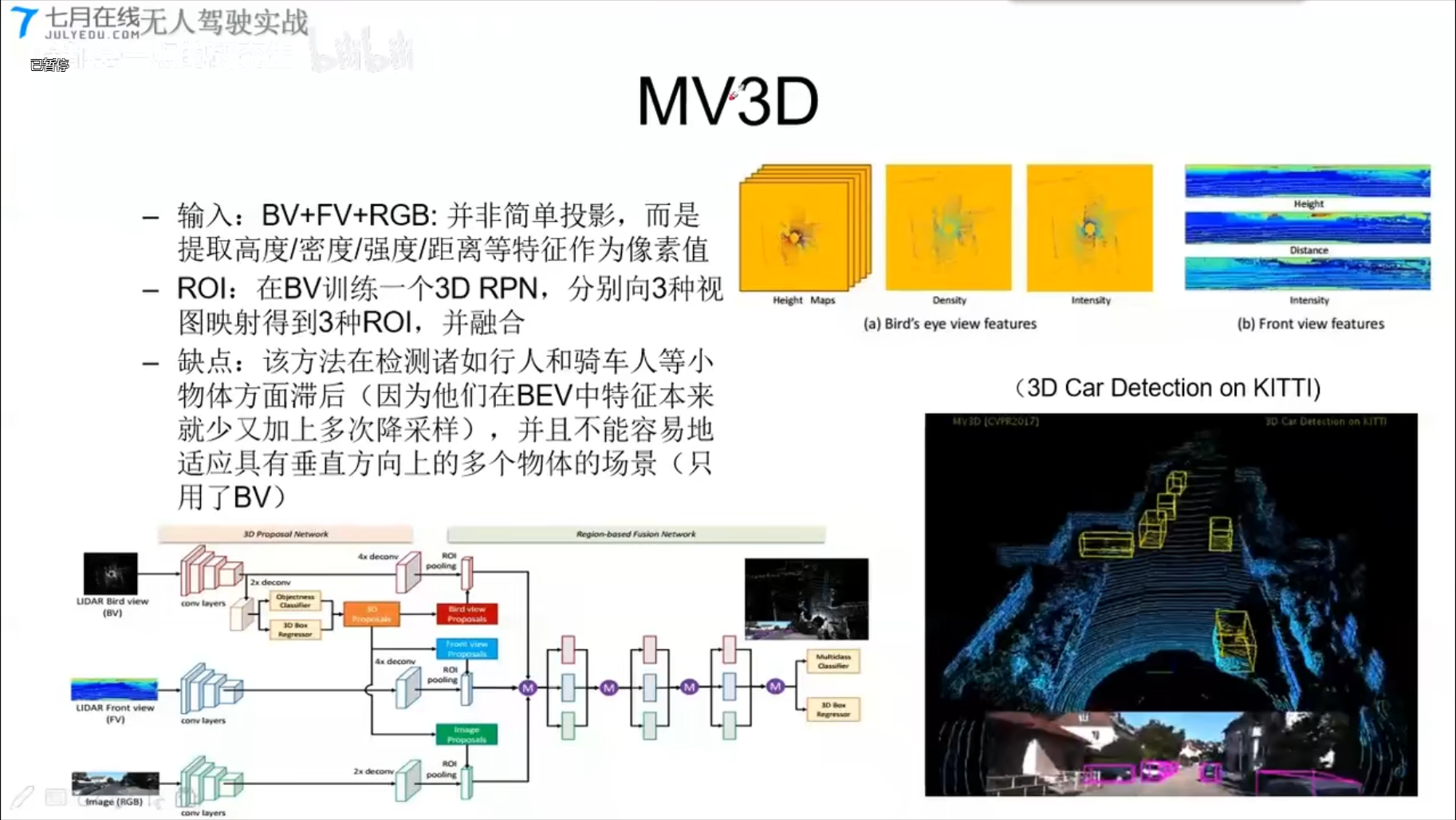
MV3D
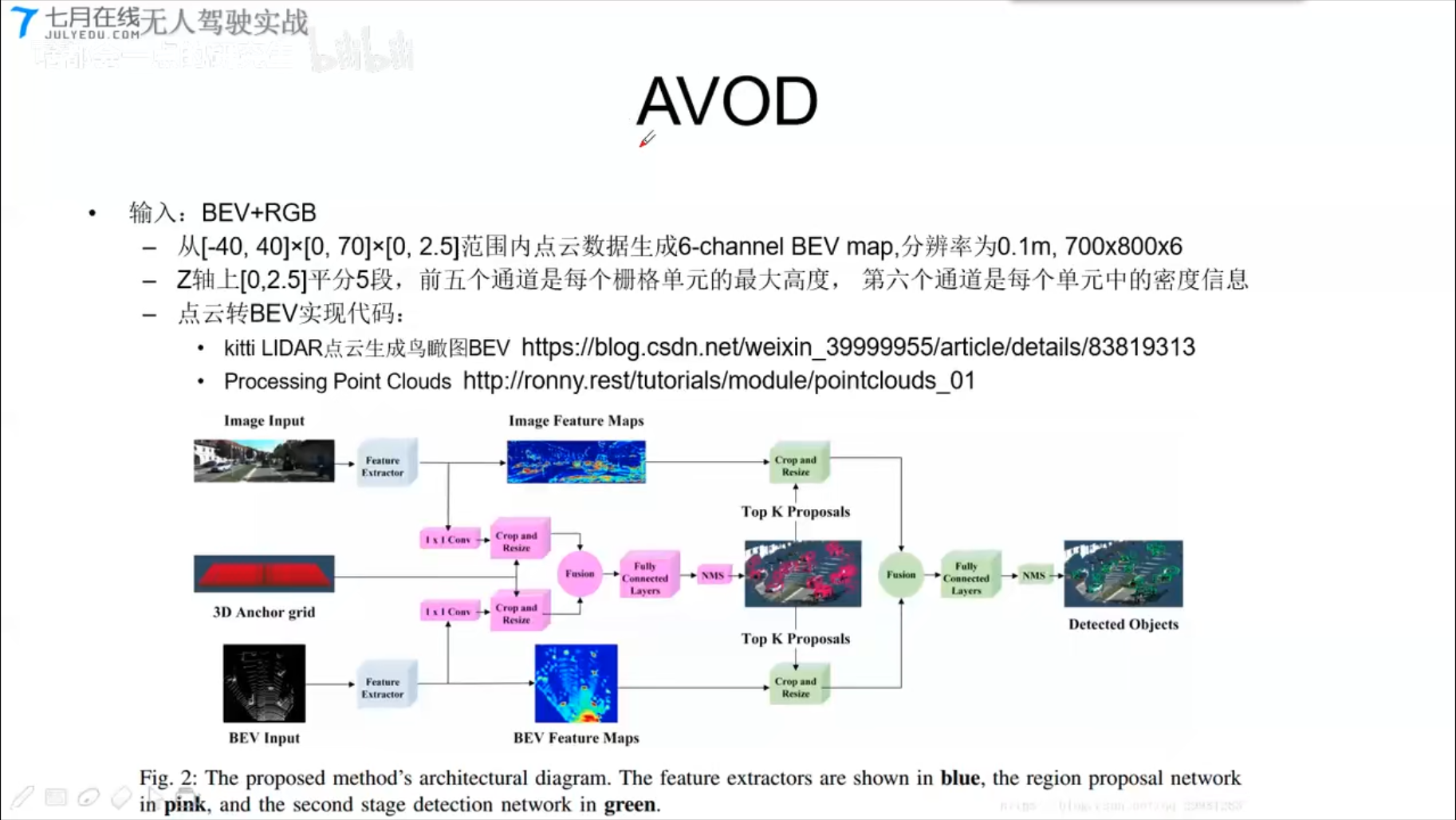
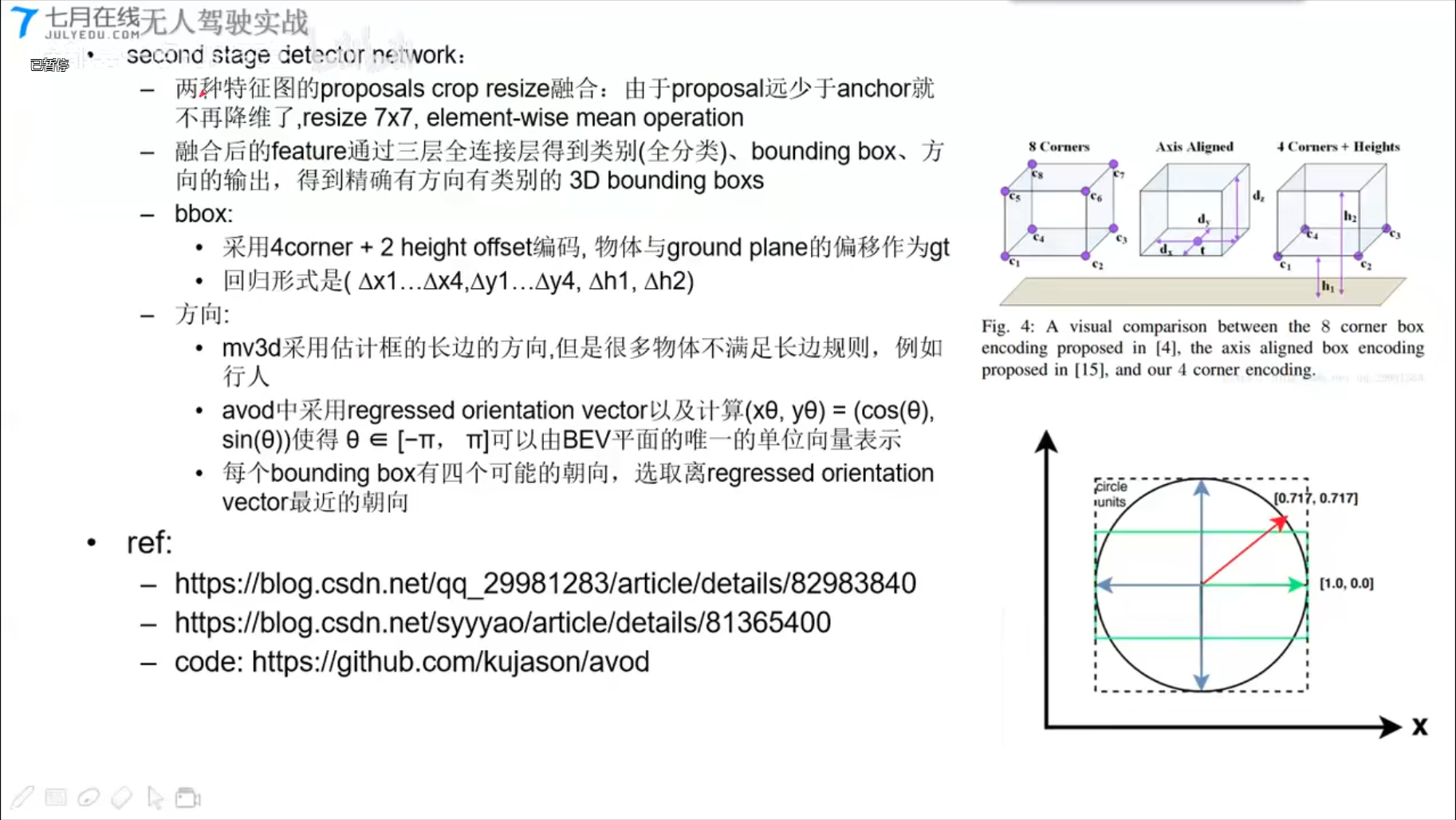
AVOD
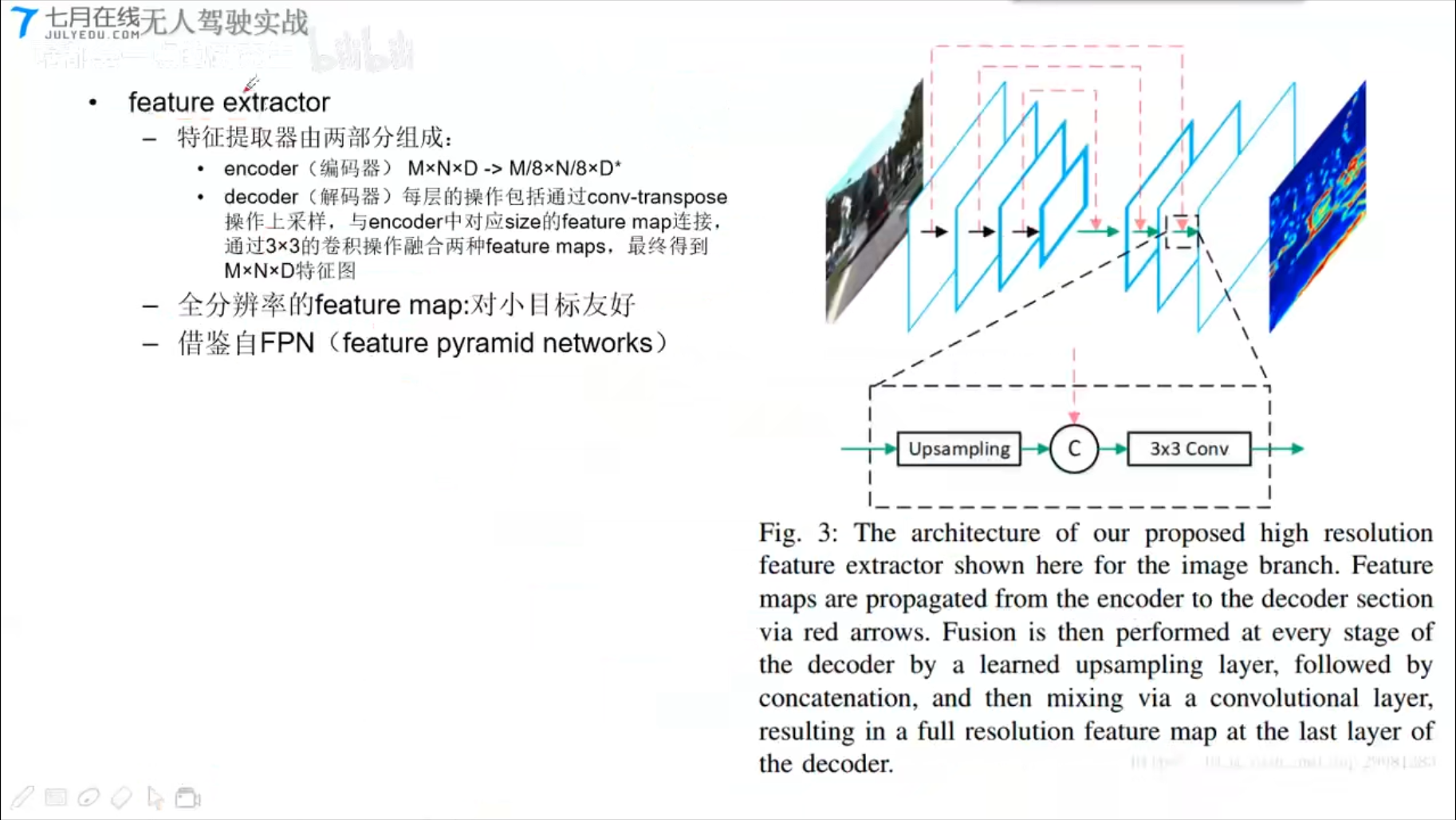
Feature Extractor
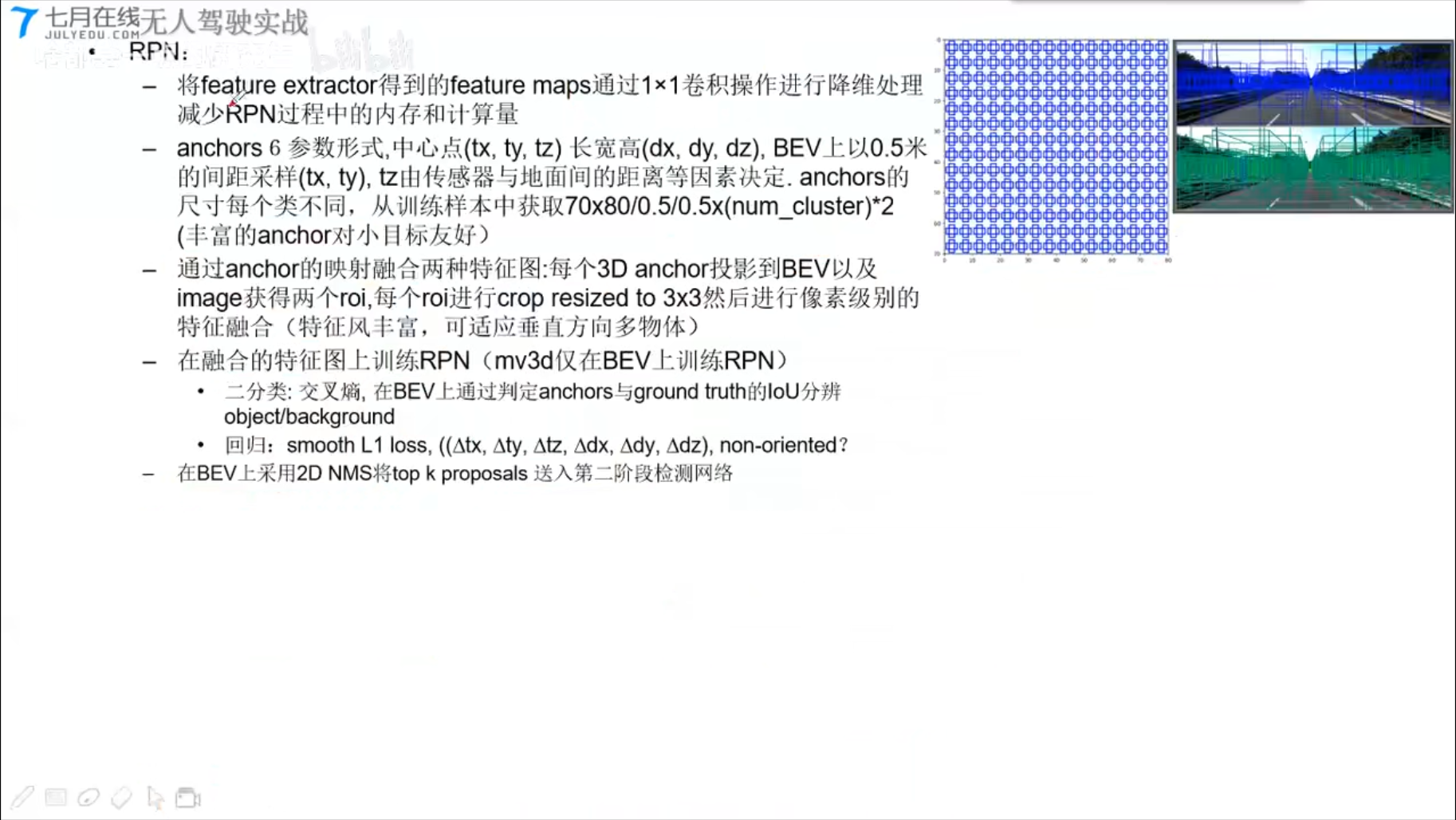
RPN
Apollo2.0

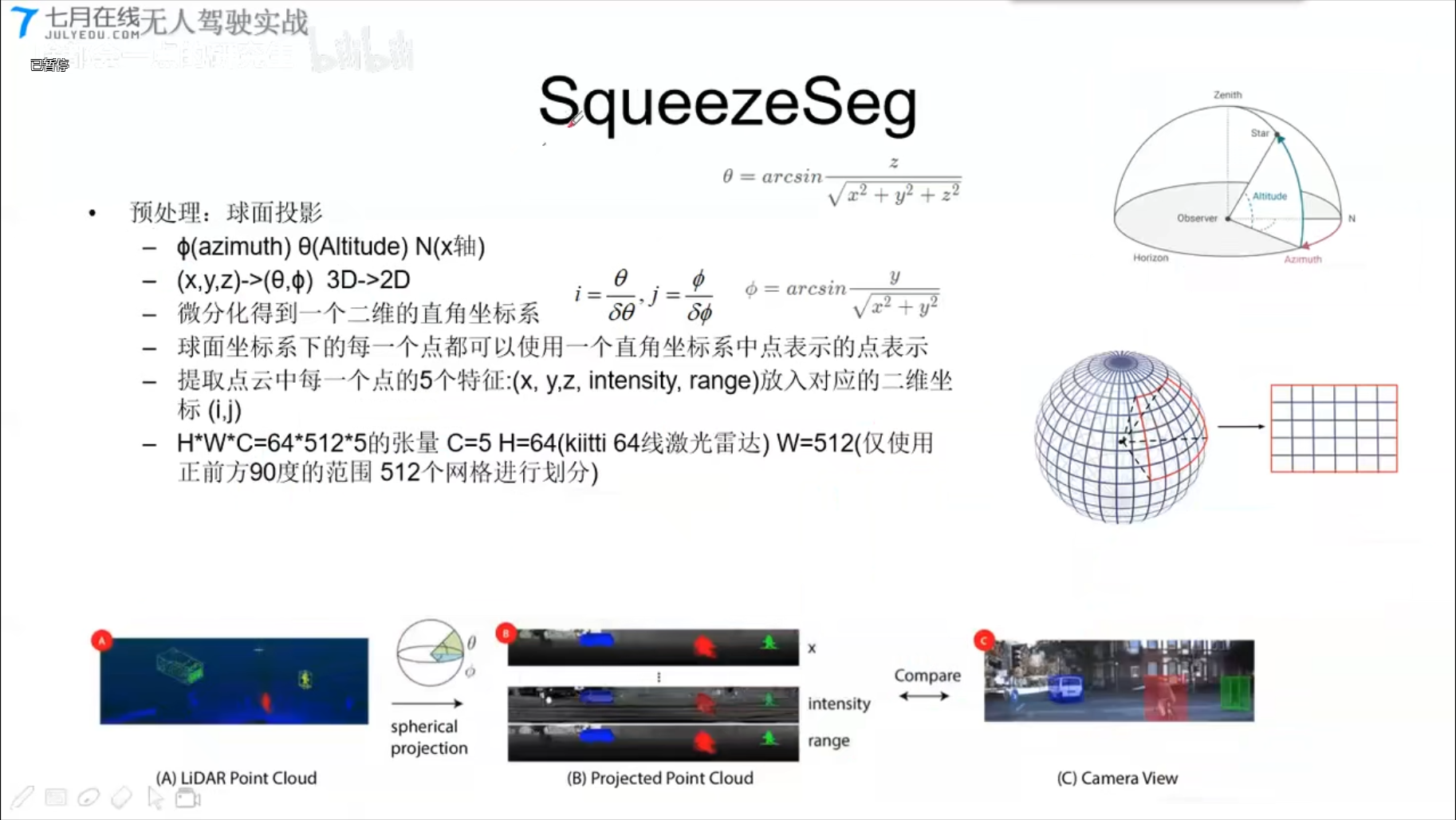
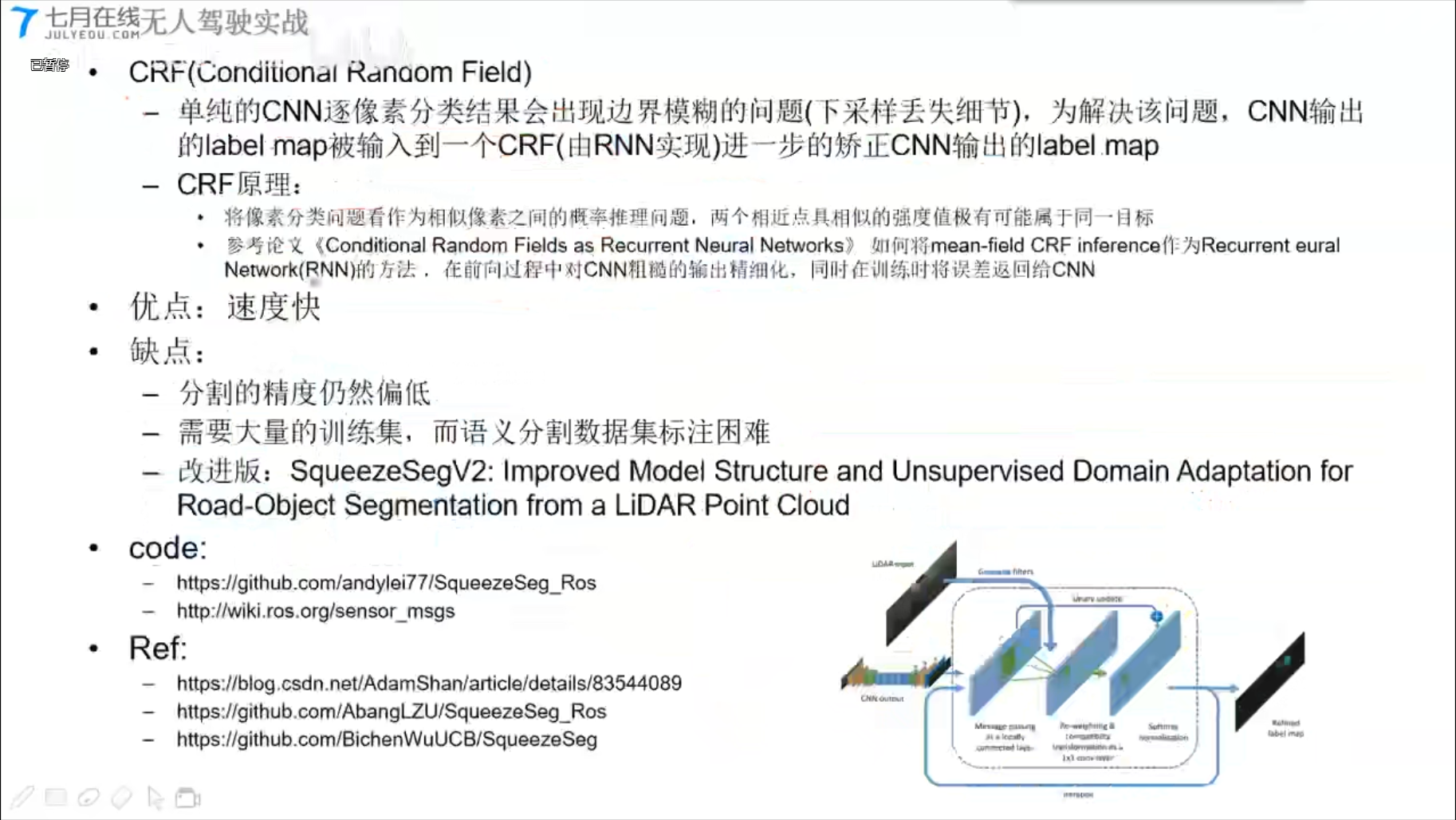
SqueezeSeg
代码实战:[tolearning]
无人驾驶汽车系统入门(二十六)——基于深度学习的实时激光雷达点云目标检测及ROS实现
2、基于体素的点云算法(Voxel-Based)
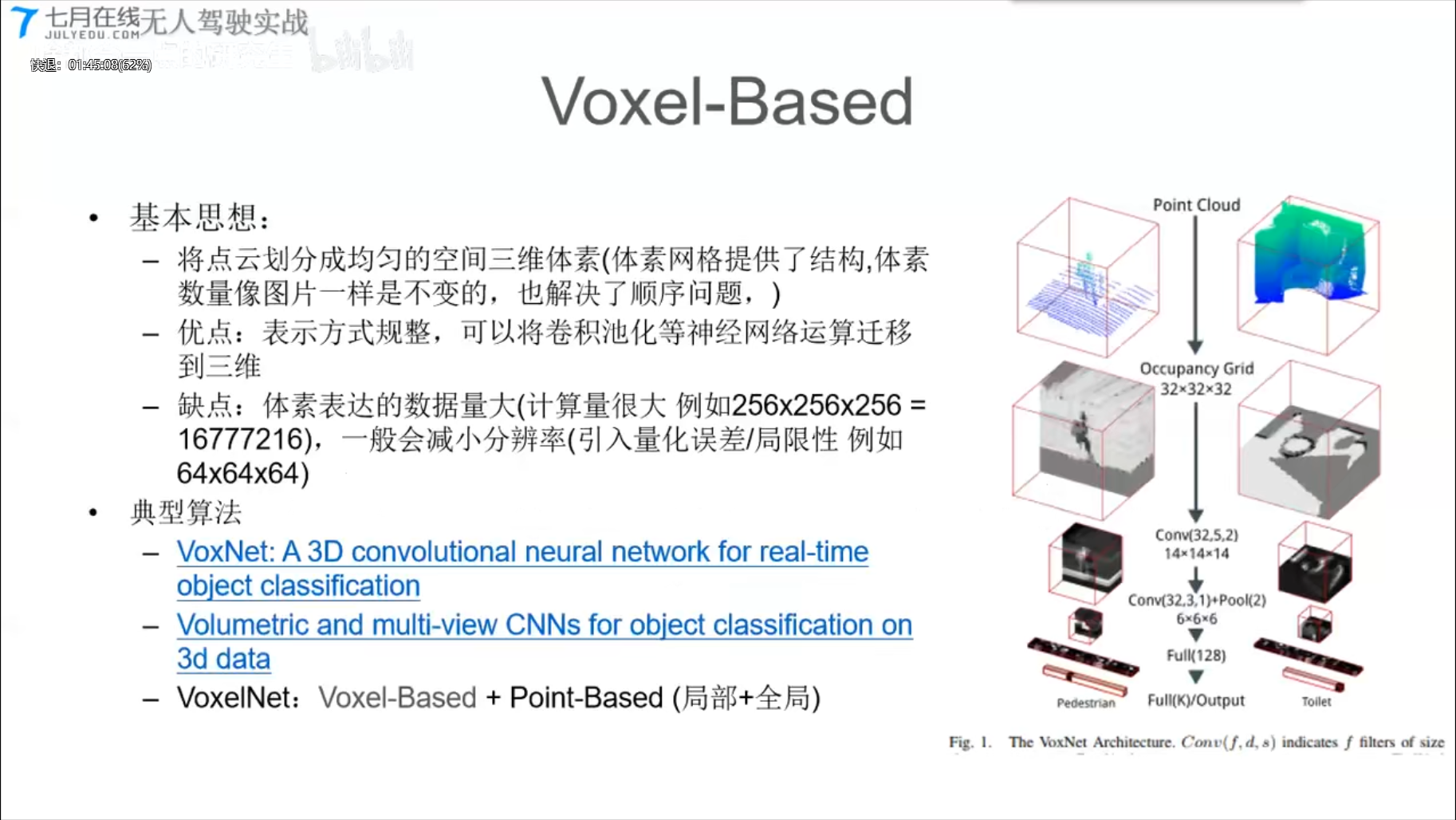
VoxNet
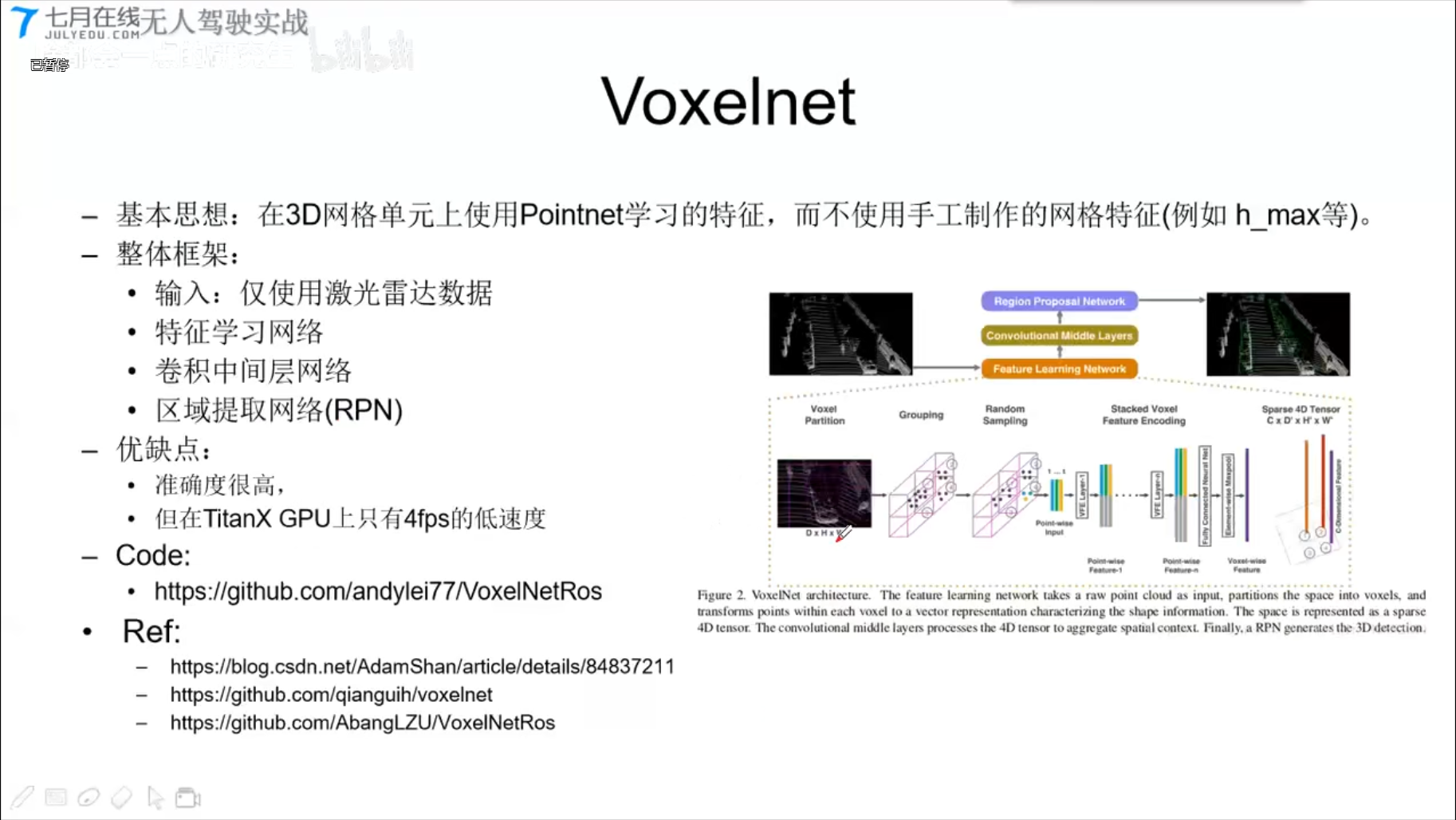
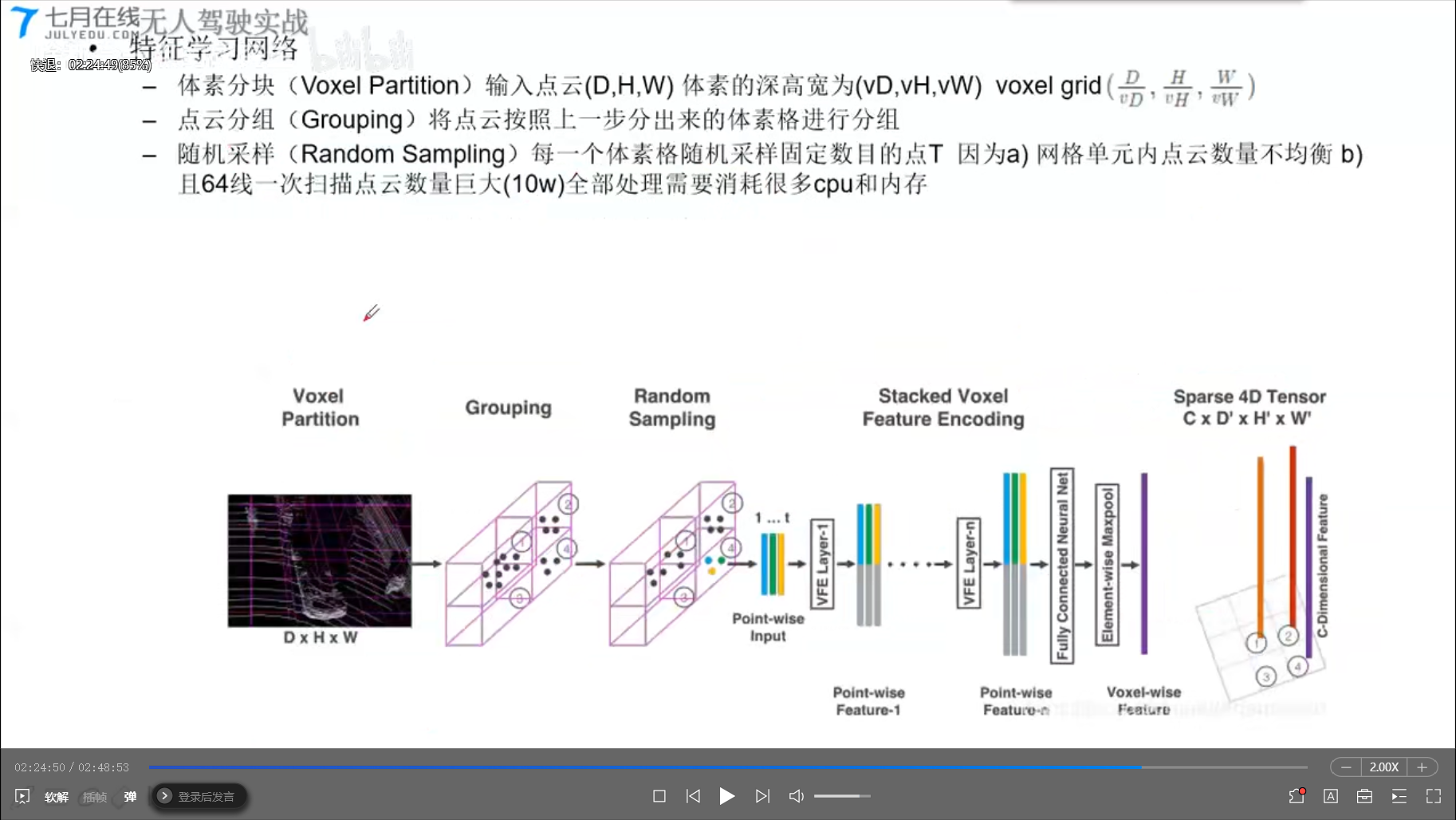
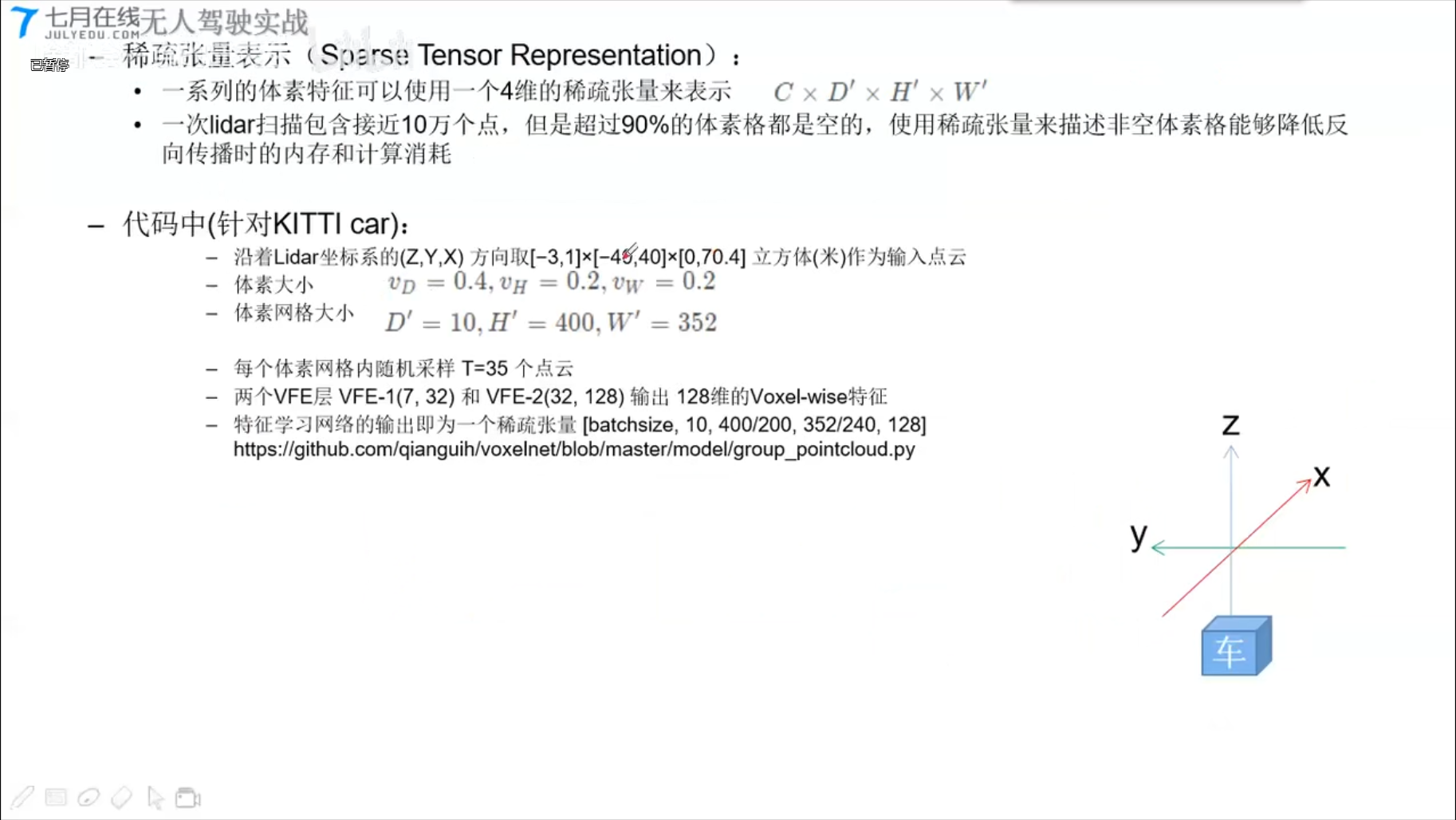
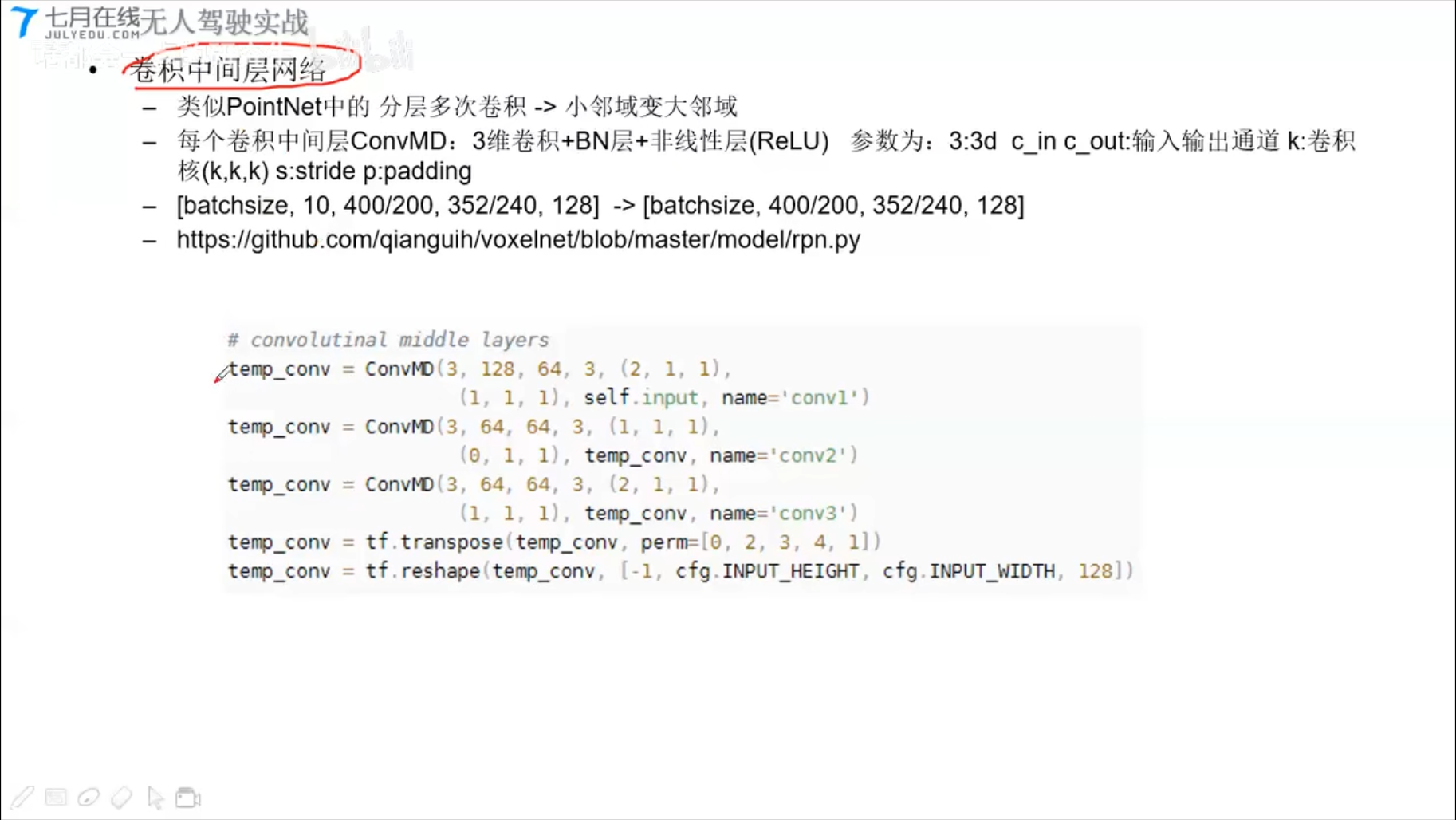
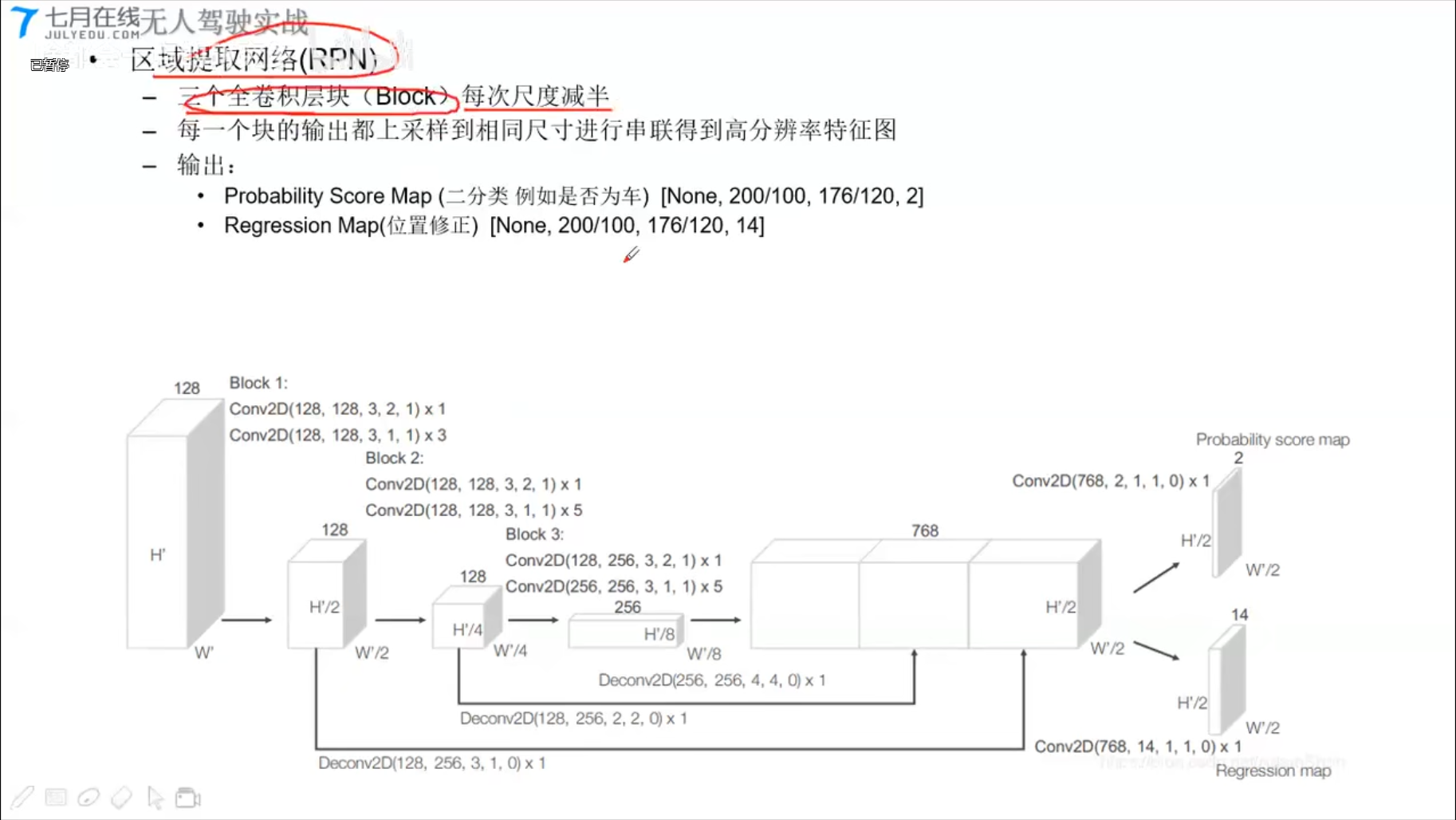
VoxelNet
= Voxel-Based + Point-Based (局部+全局)
3、基于树的点云算法(Tree-Based)
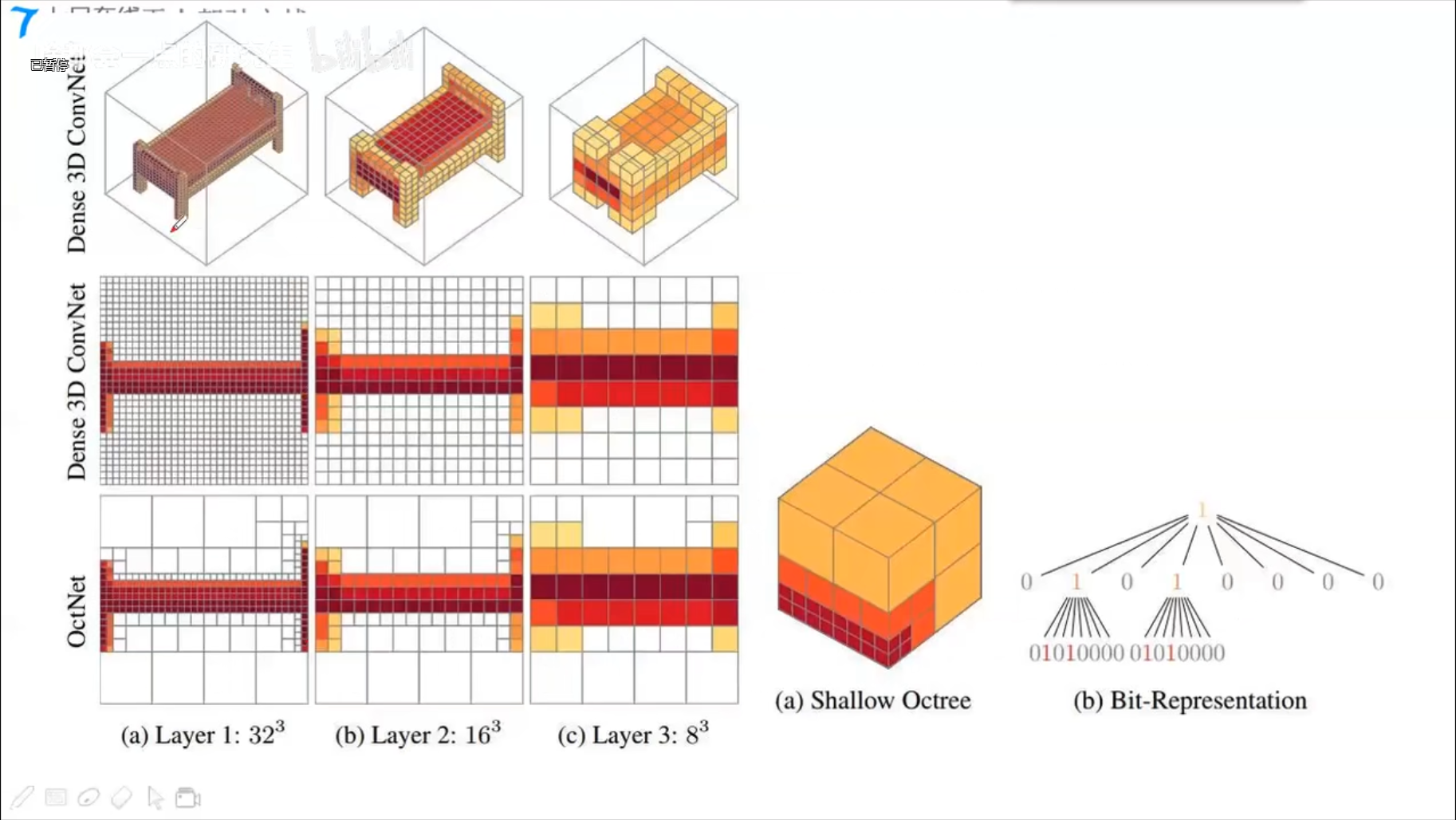
OctNet
O-CNN
Escape from Cells
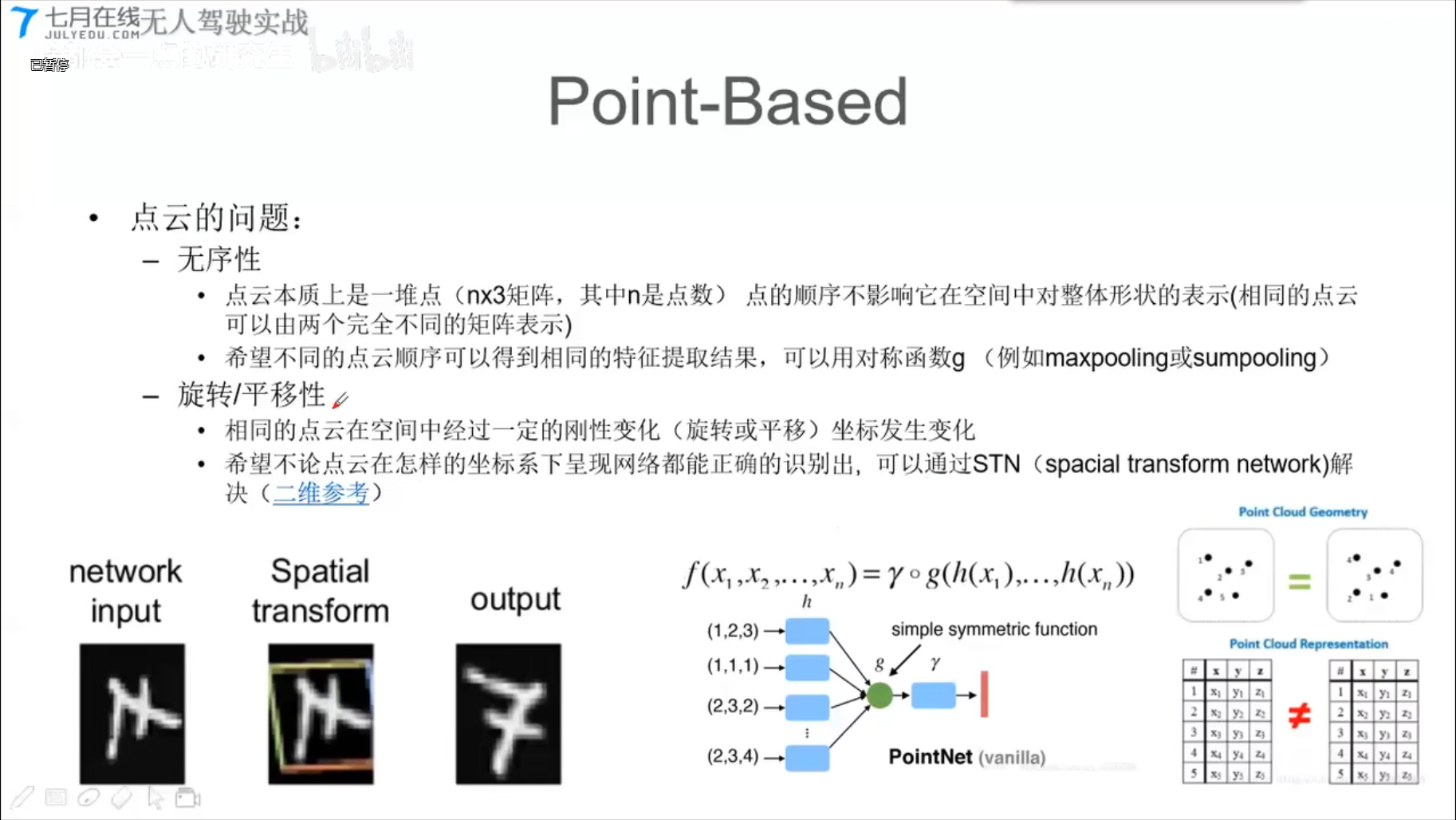
4、基于点的点云算法(Point-Based)
- 对称函数、X变换
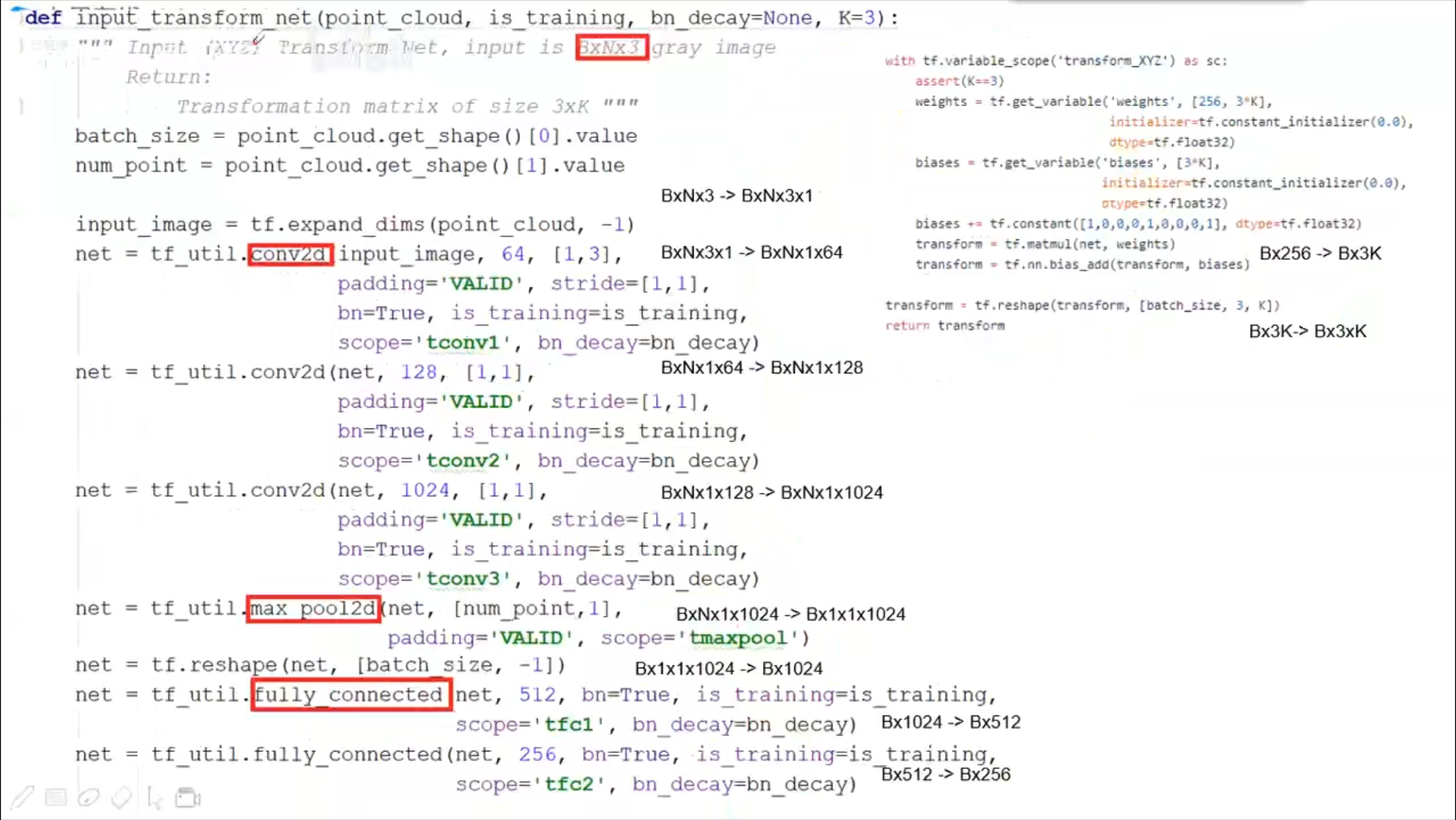
PointNet (CVPR2017)
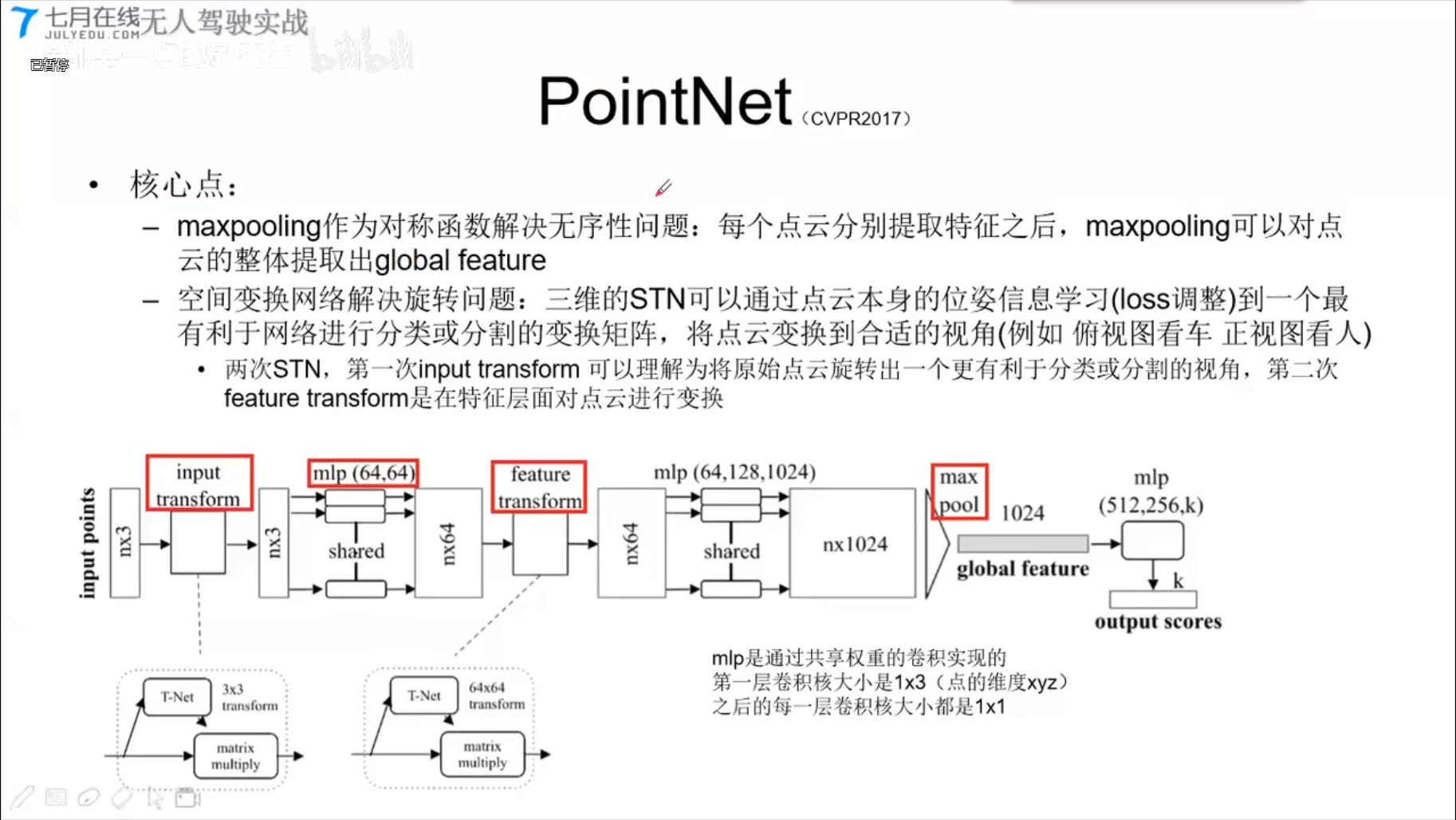
1x3的卷积,实现全连接层
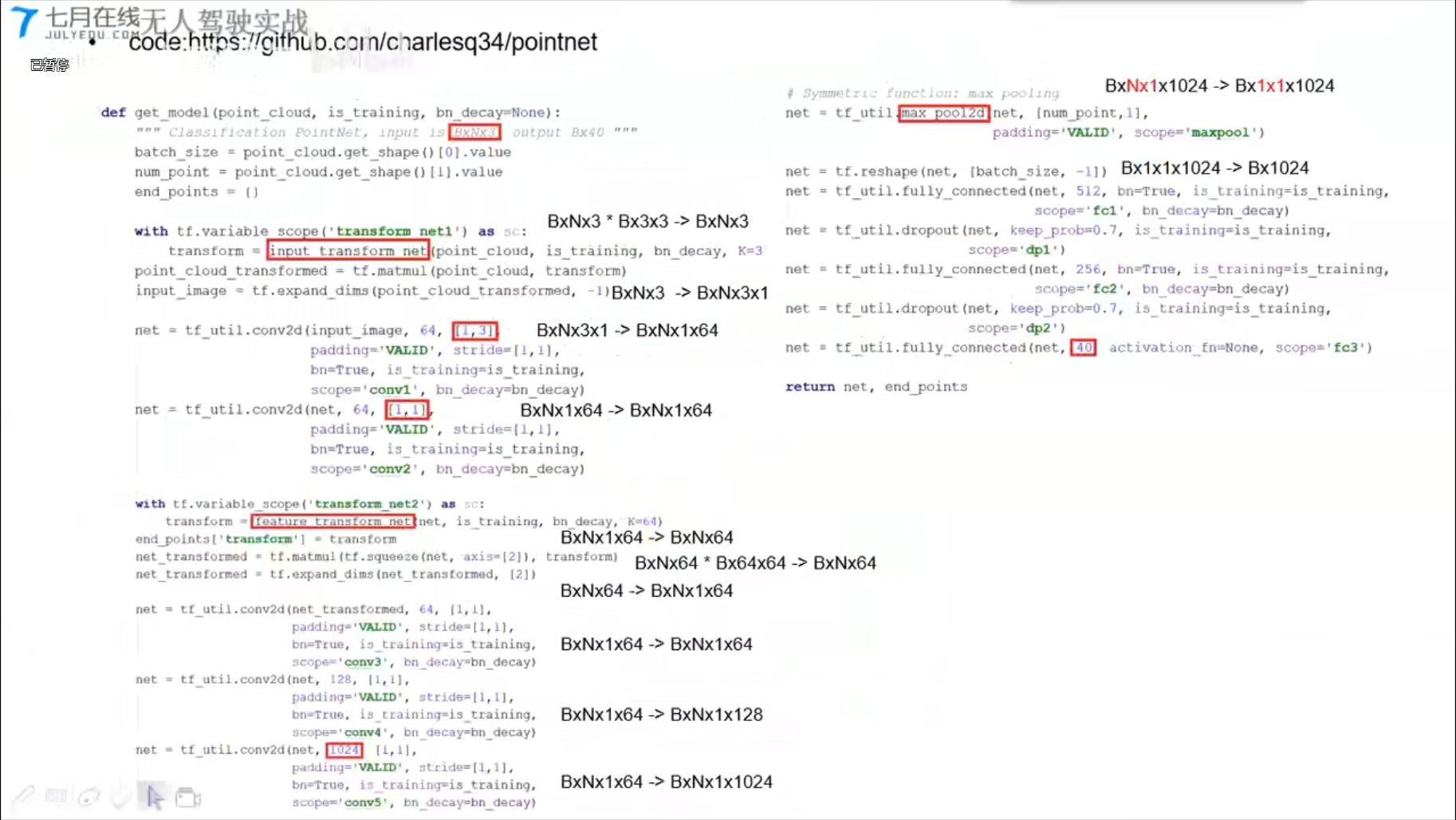
transform_net
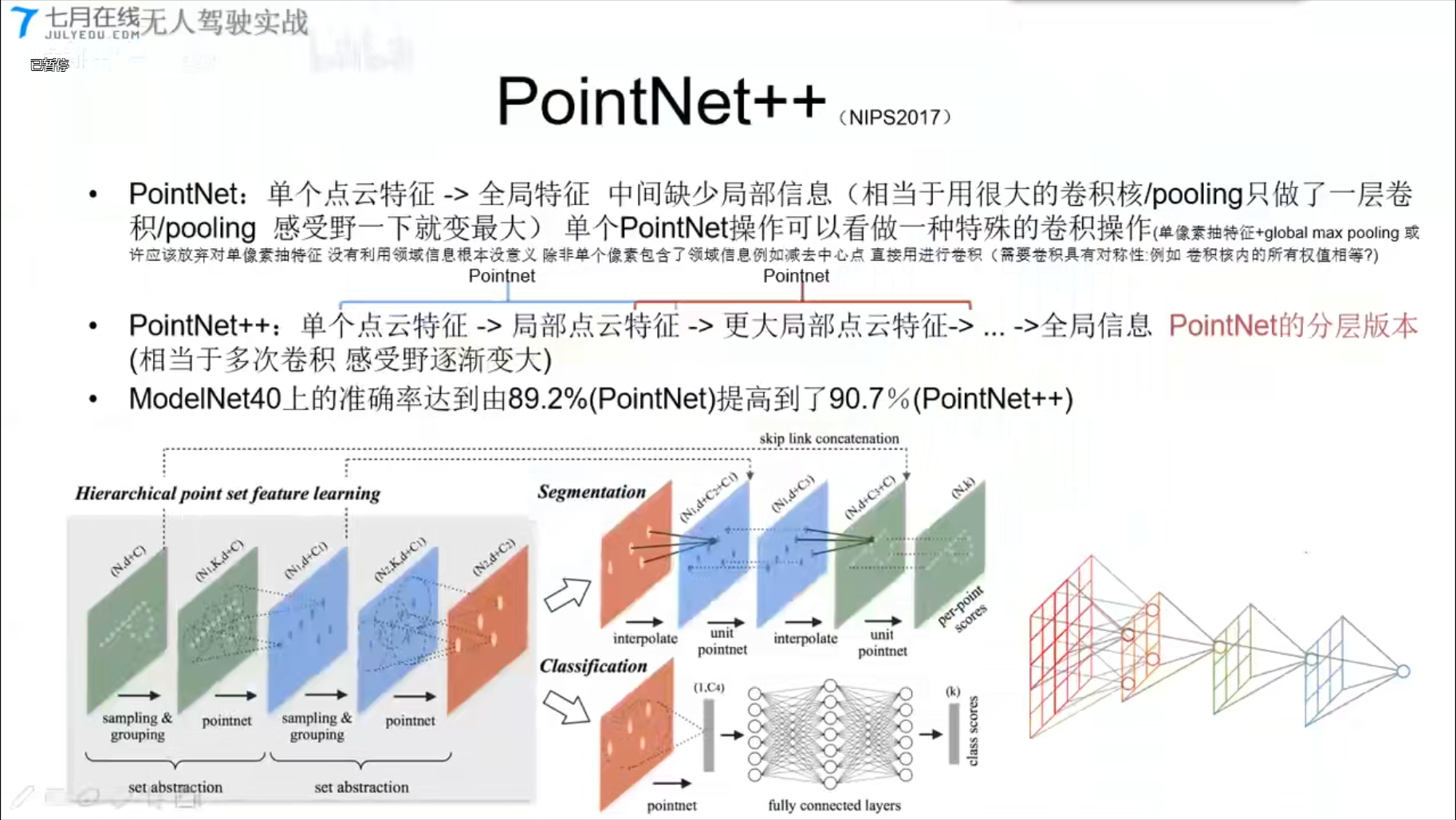
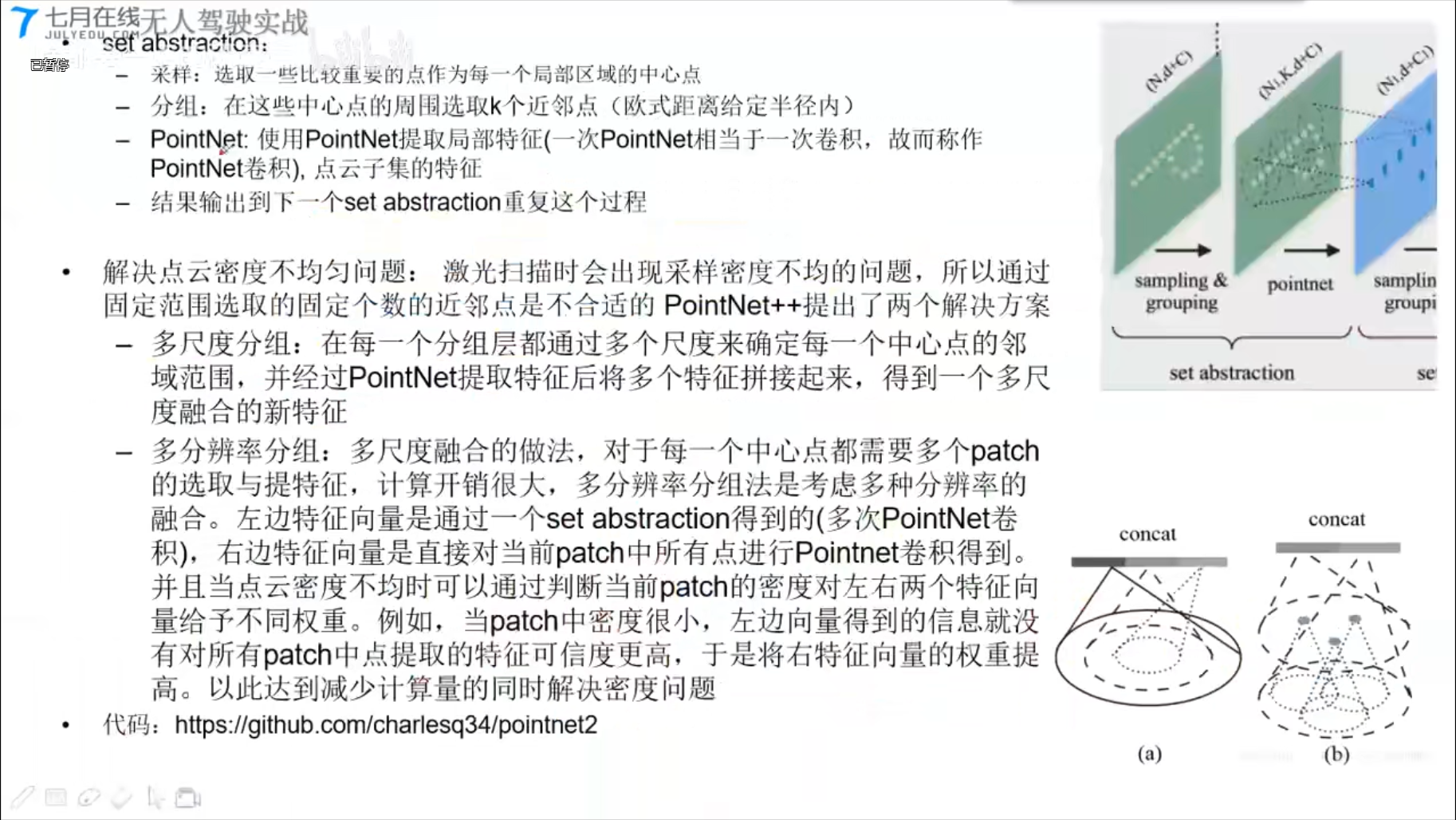
PointNet++ (NIPS2017)
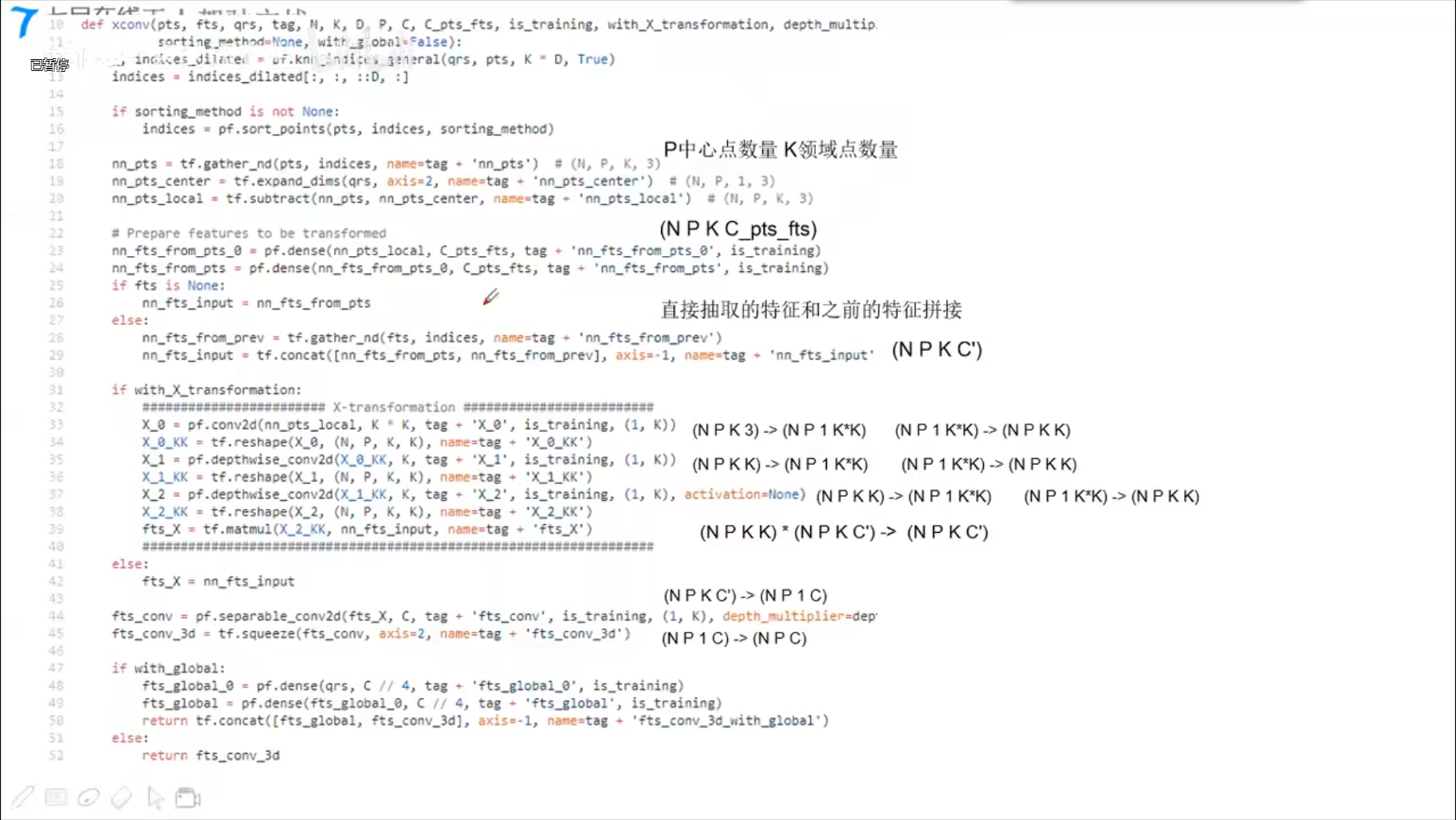
PointCNN
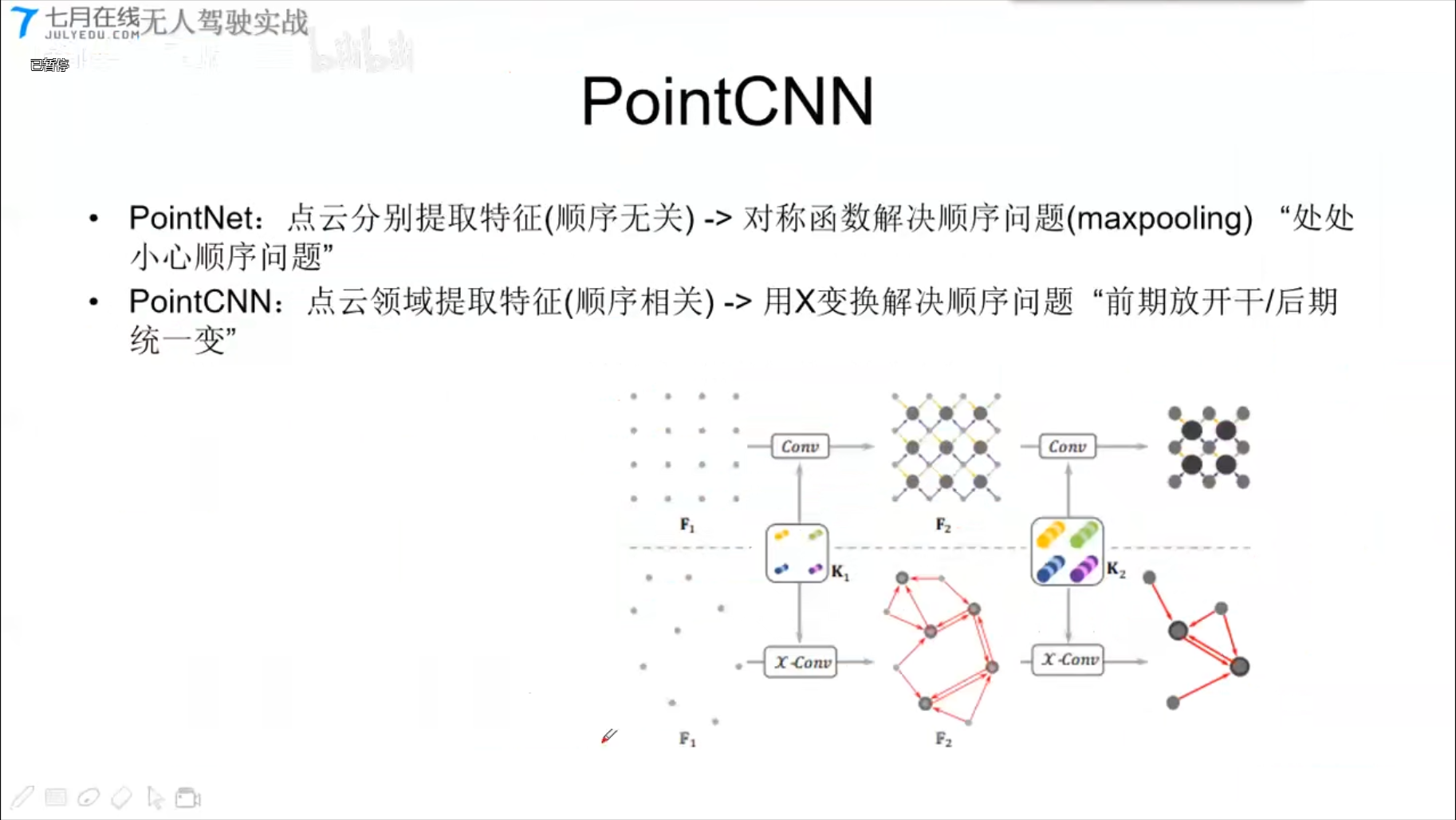
核心:X卷积
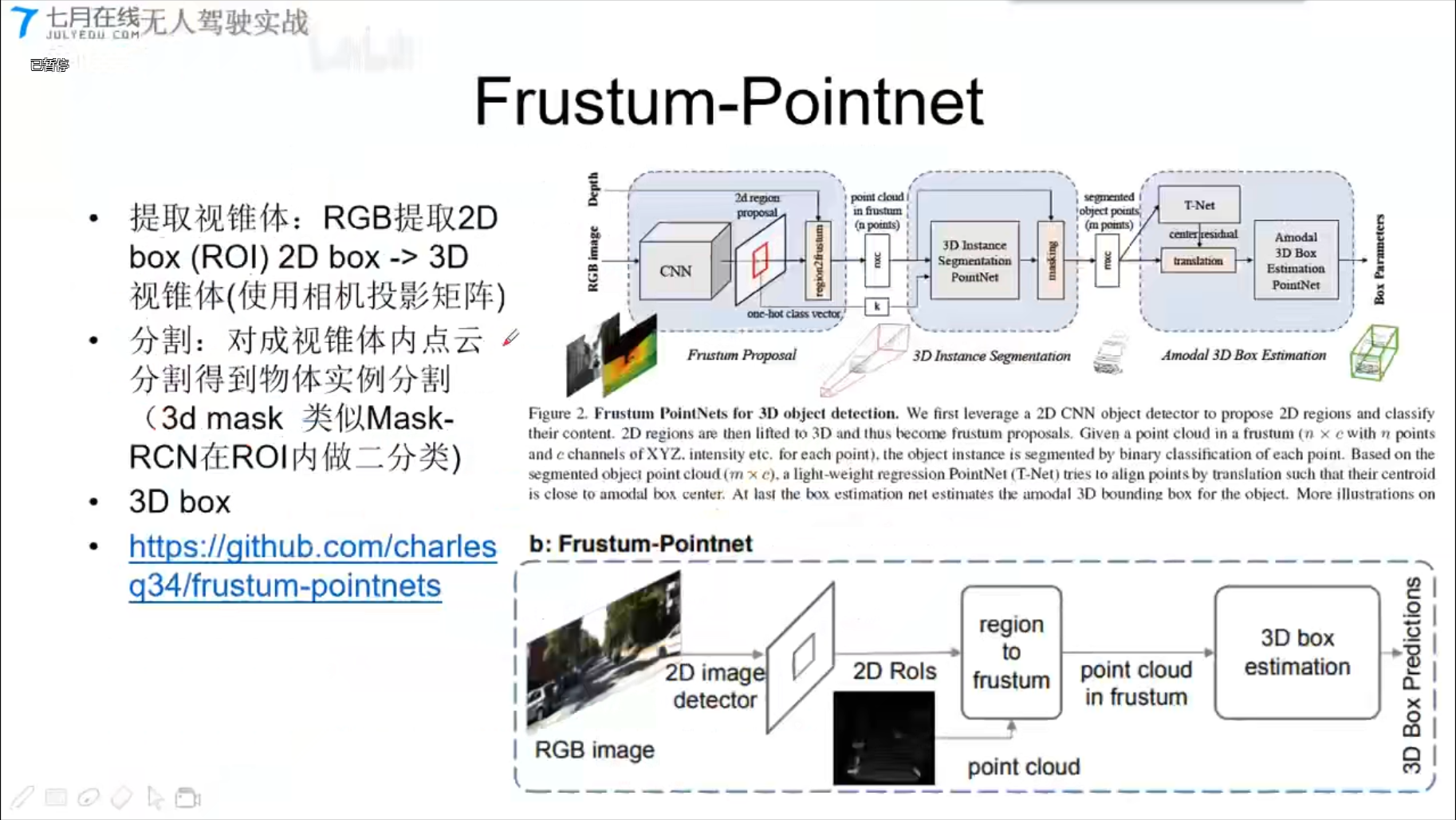
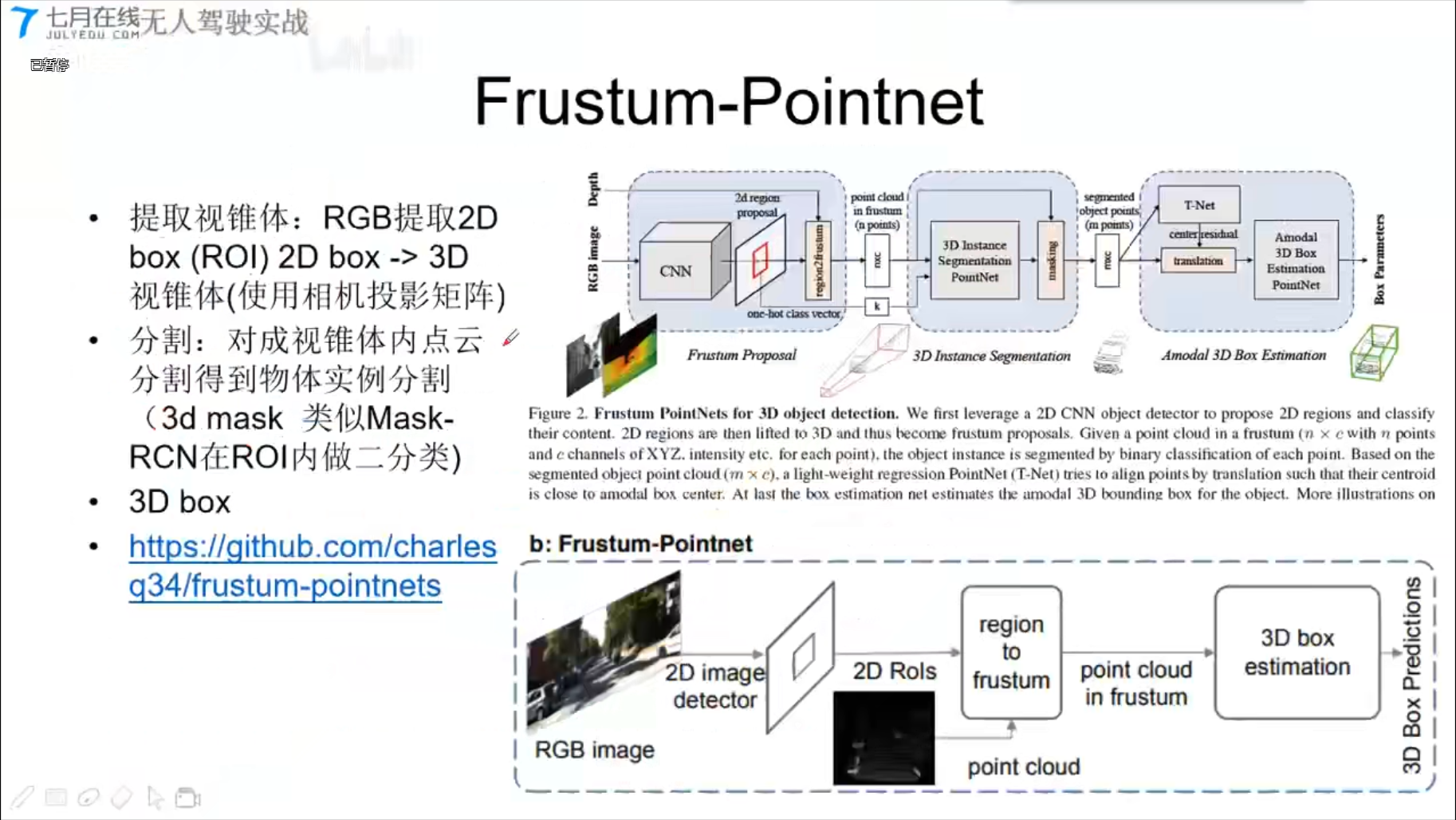
Frustum-Pointnet
PointRCNN
5.2 Voxelnet
代码结构

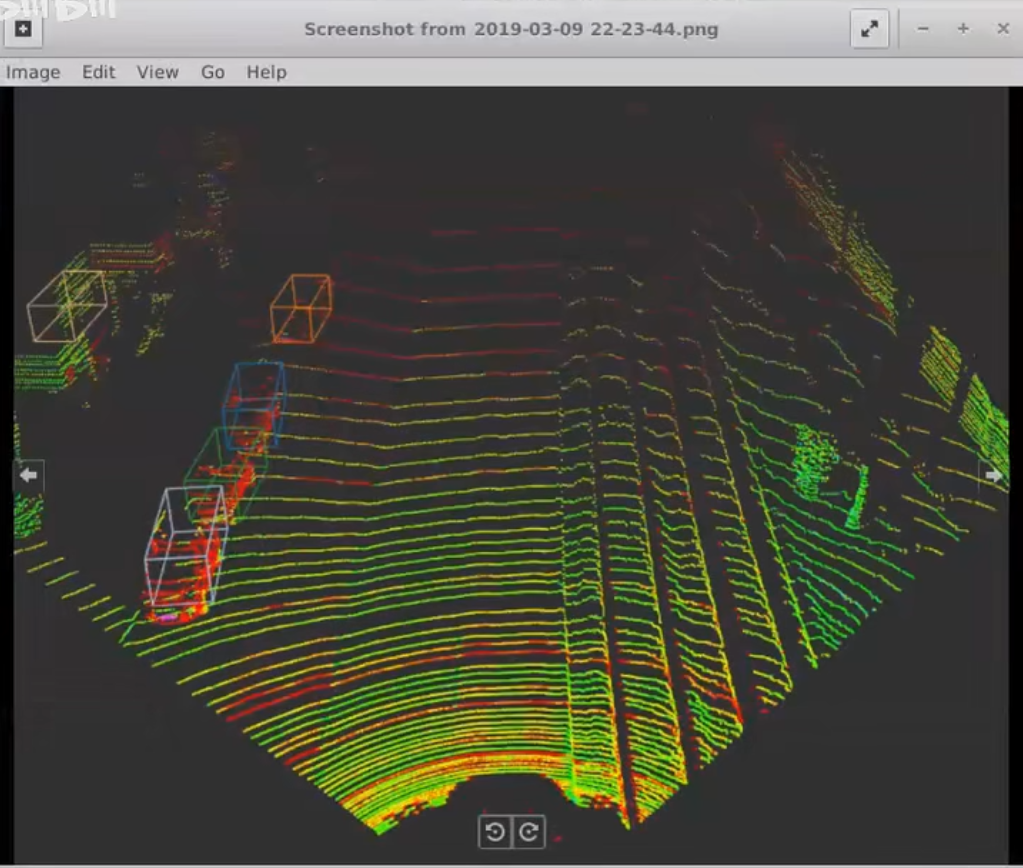
效果:
相关资料
系列零:自动驾驶相关数据集调研总结【附下载地址】(2023更新)
# 系列一:3D目标检测框架综述(OpenPCDet|mmdetection3d|Det3D|Paddle3D)