CONTENTS:
[toc]
1 PNC(Panning and Control)Overview
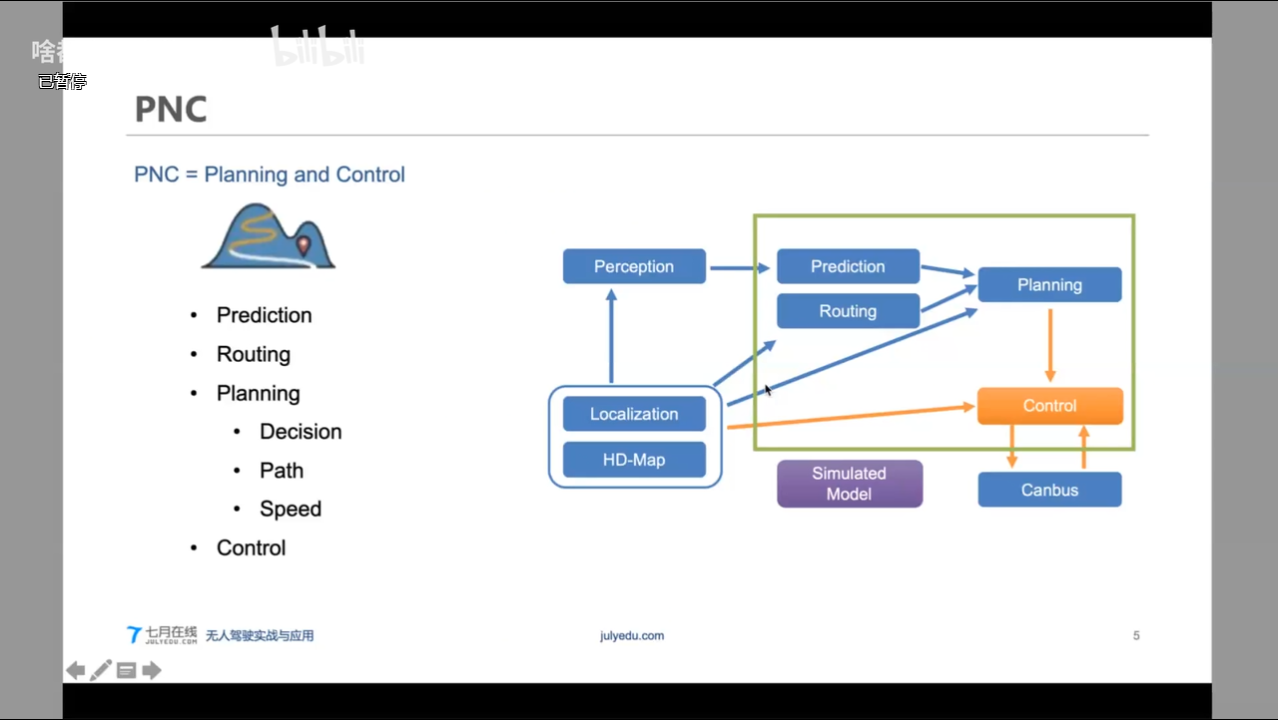
难点:
- 人和人之间的博弈–转换成–人和机器的博弈(路口会车情况)
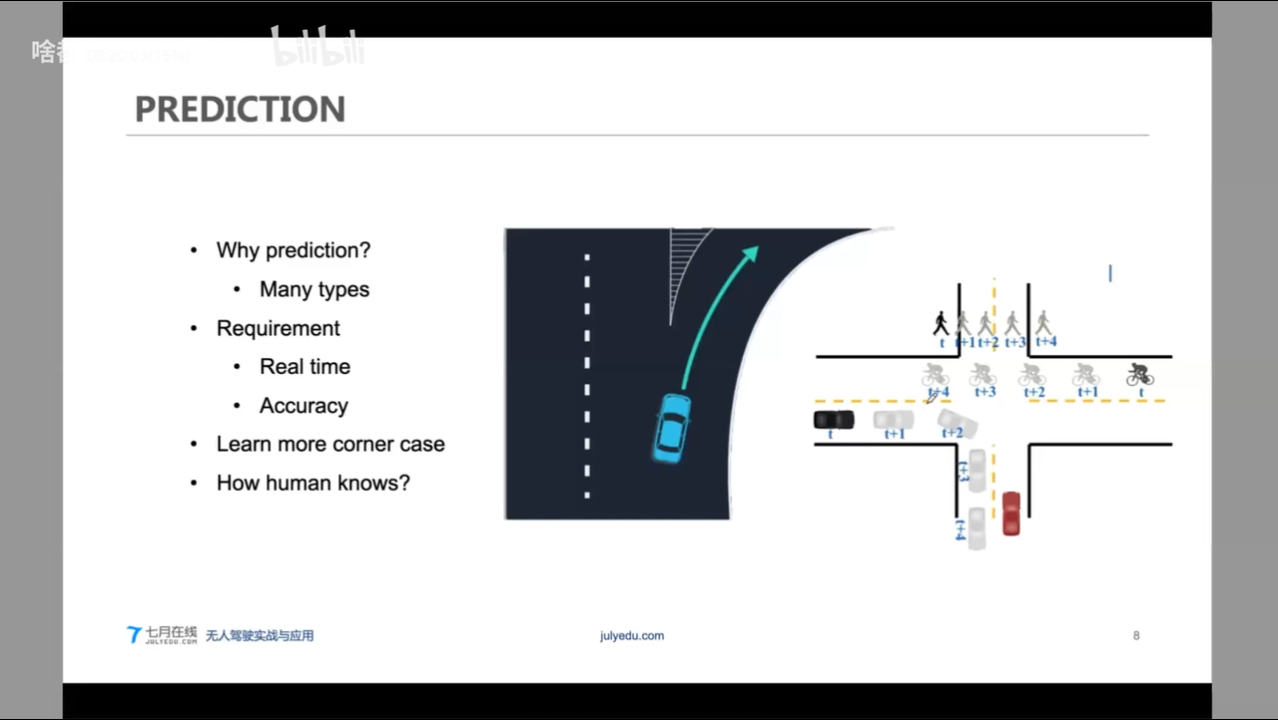
2 Prediction Task
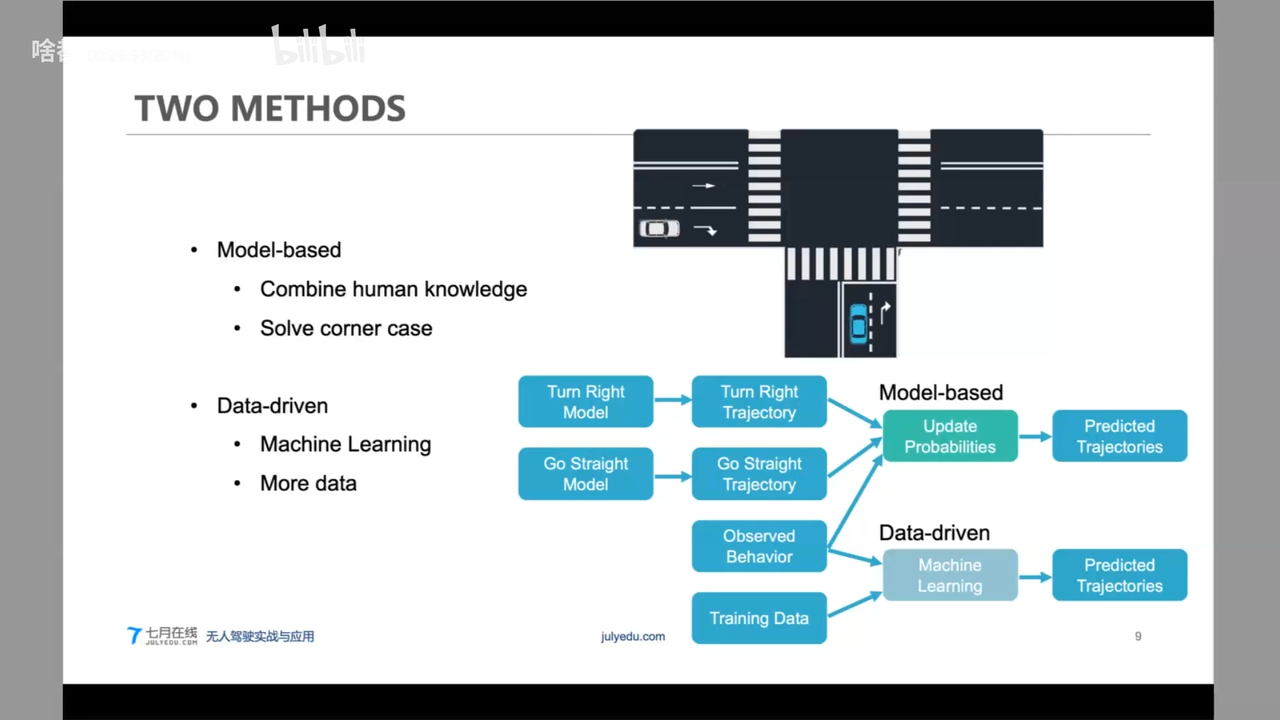
两种方法
- Model-based
- Trajectories轨迹预测
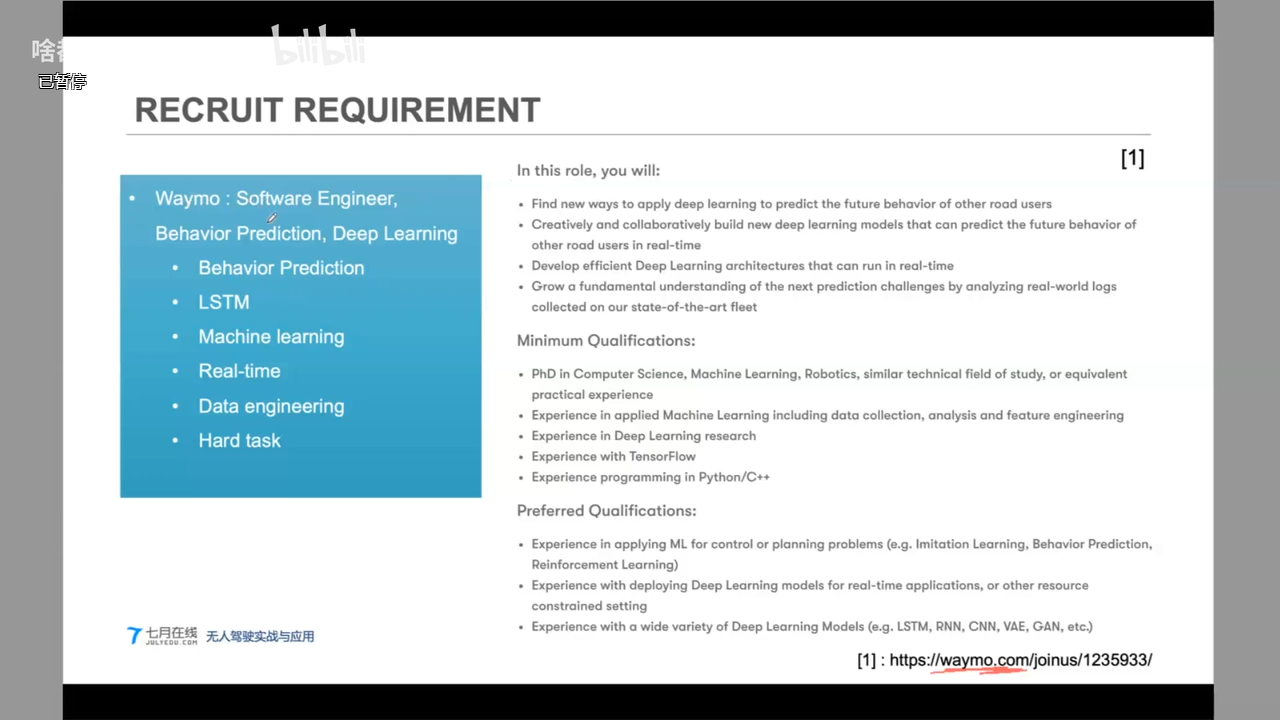
Recruit Requirement
3 Vehicle Predict (车辆预测)
道路建模
- 连续空间–转换成–预测问题
- 非结构化数据(感知是结构化数据)
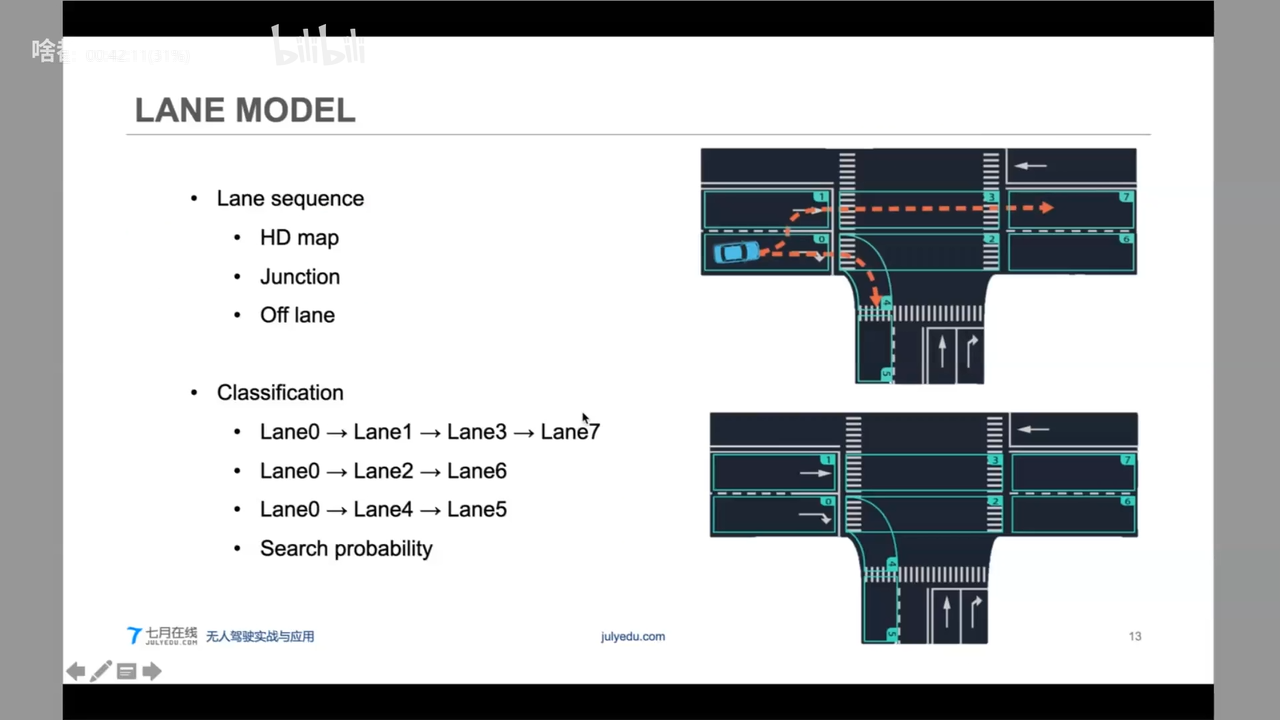
lane Feature
Lane S (前方)
Lane L (宽度)
reference lane
Curvature 曲率
Traffic law 交通信号
Vehicle State
- Velocity (加速度)
- Acc (速度)
- Heading ()
- Heading rete(角度)
- Type(车的类型,救护车,交通车)
- Size
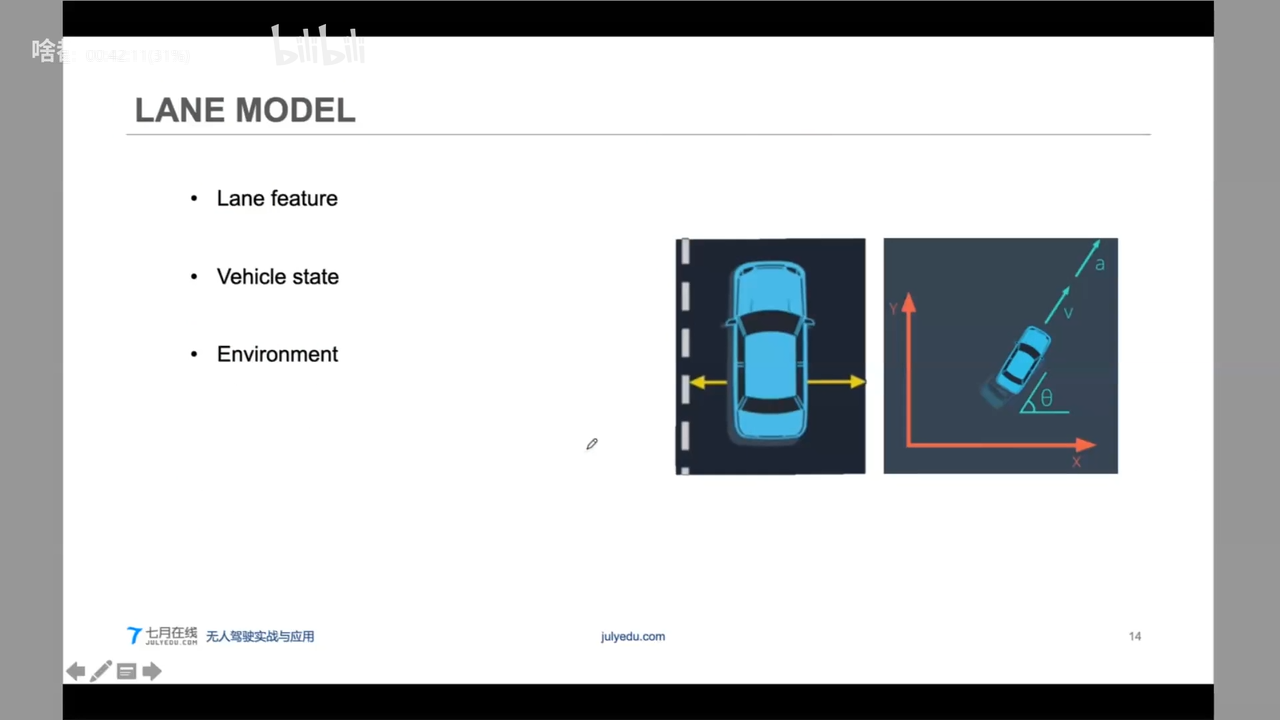
Lane Model
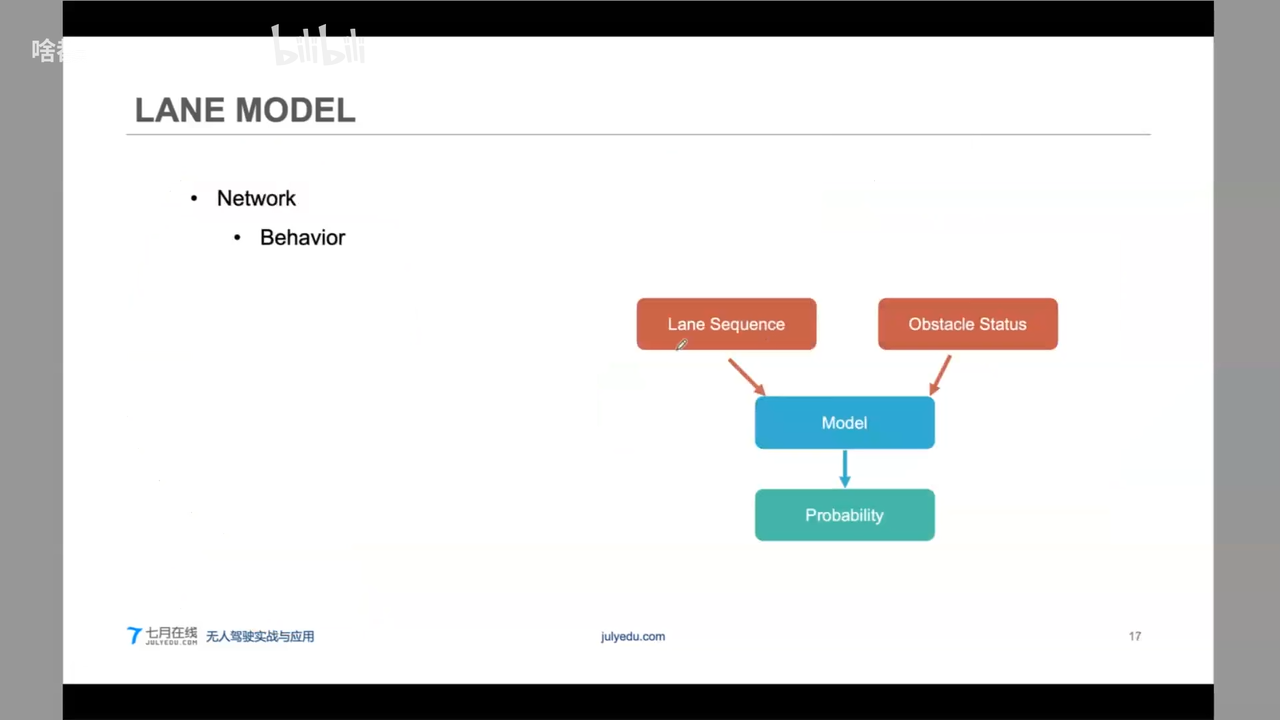
- Obstacle Statue 输入几秒的数据
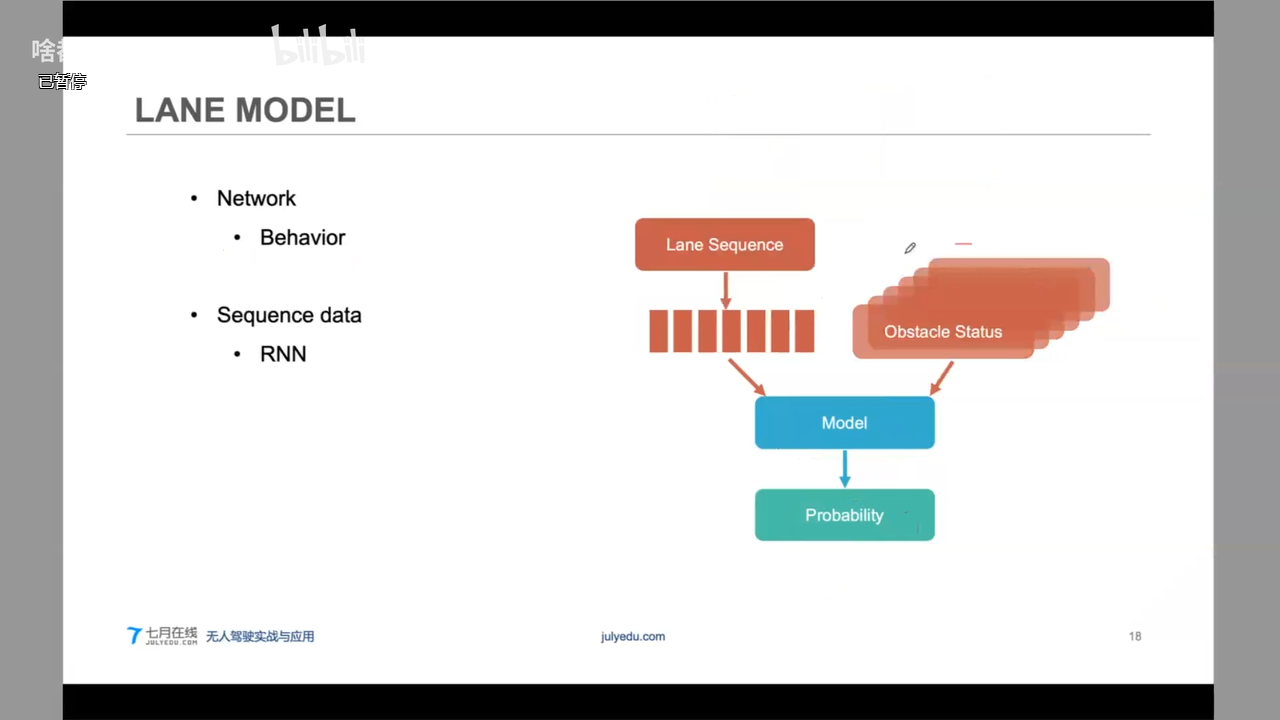
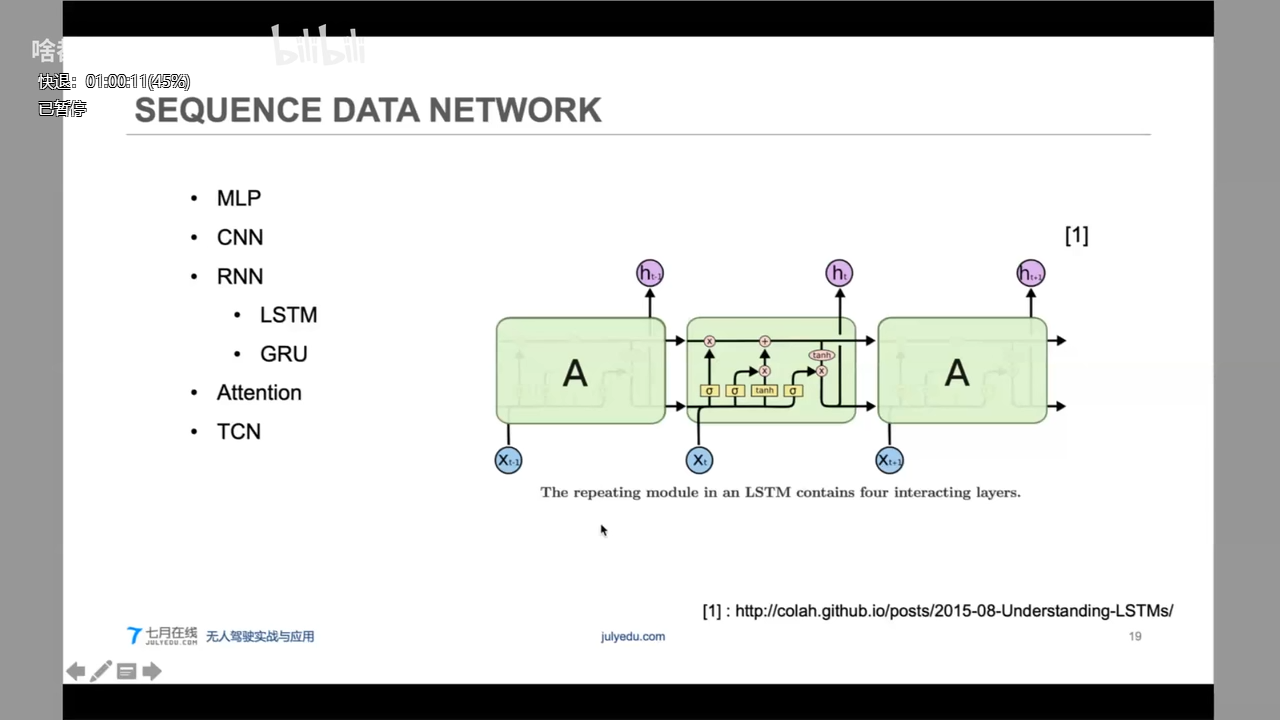
Squence Data Network
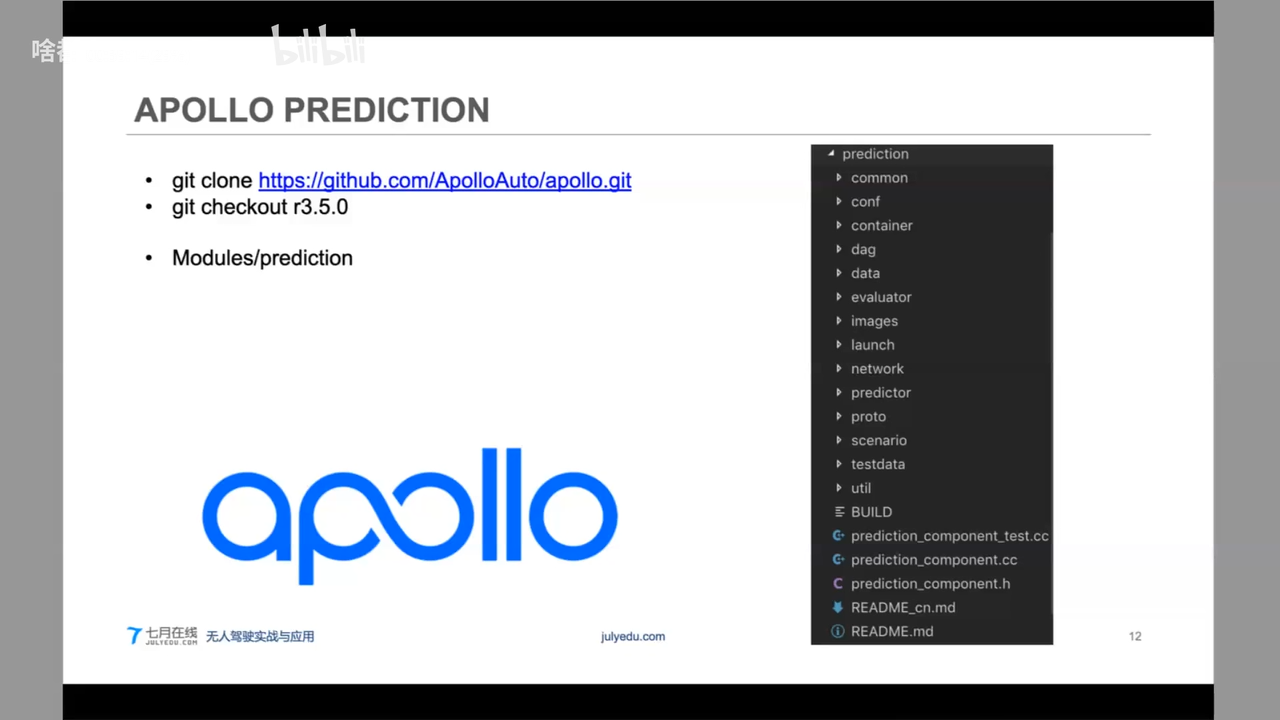
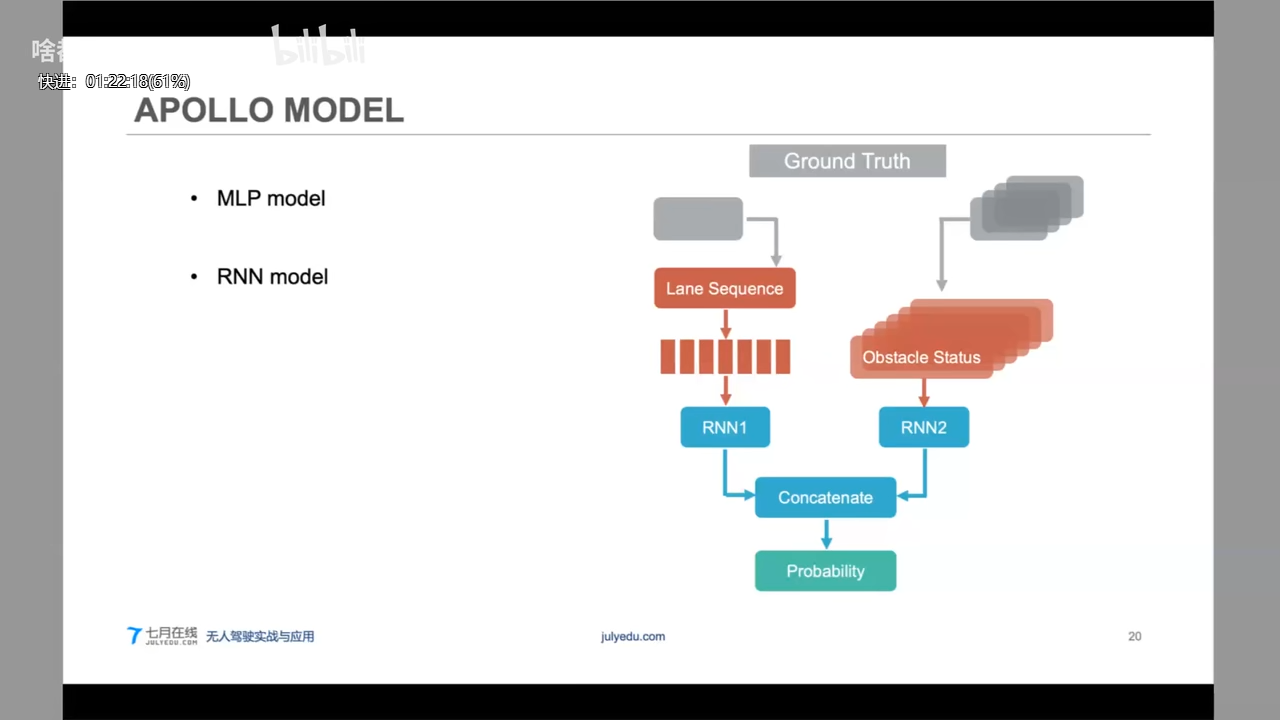
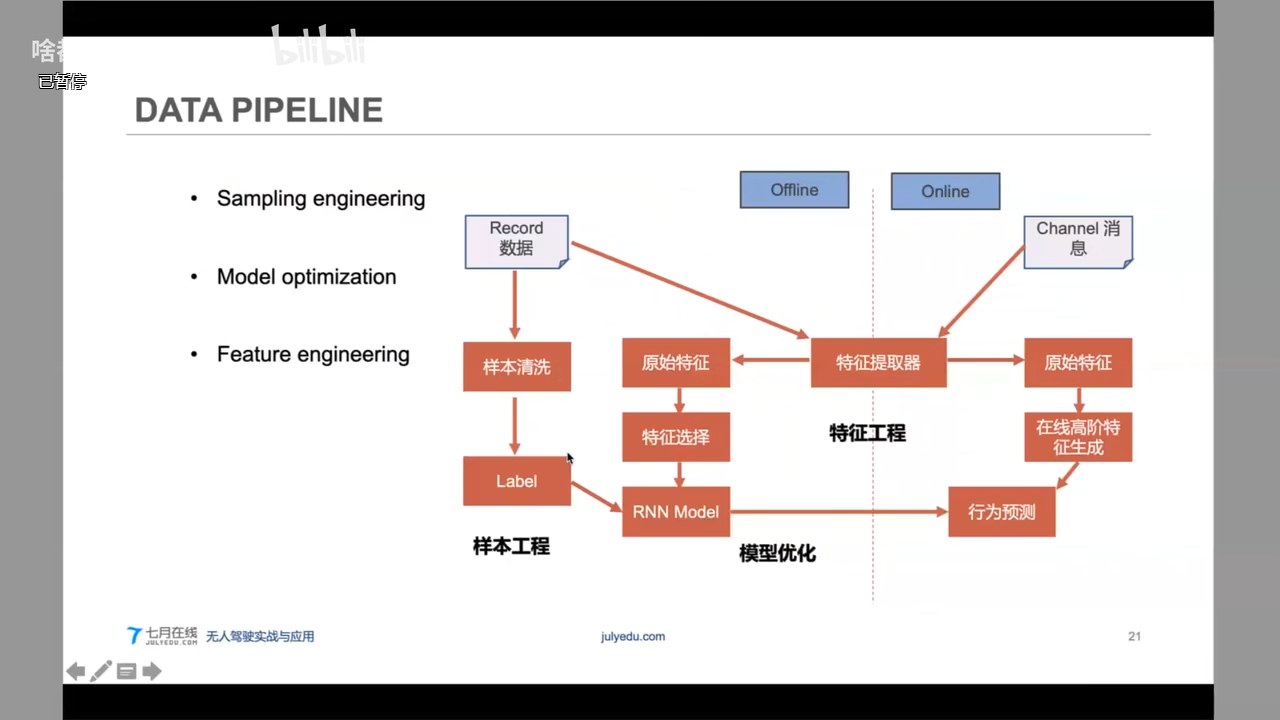
Apollo Model
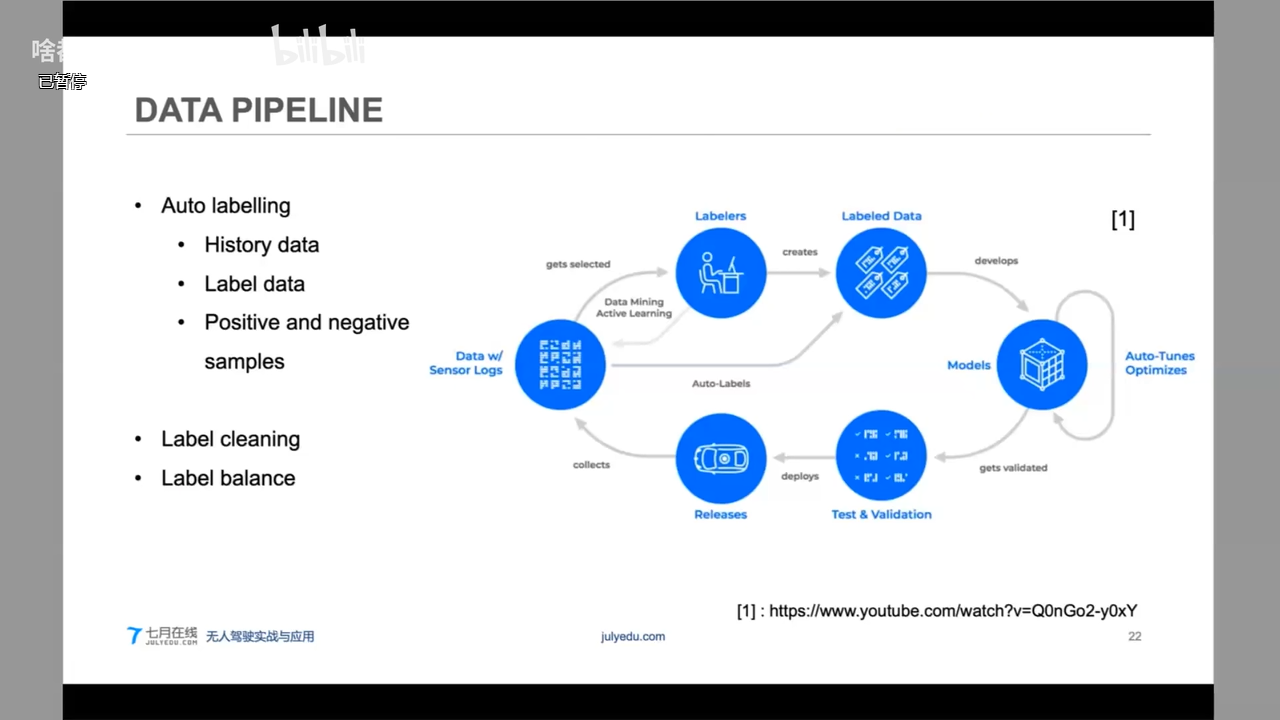
Data Pipeline
waygom 首席科学家
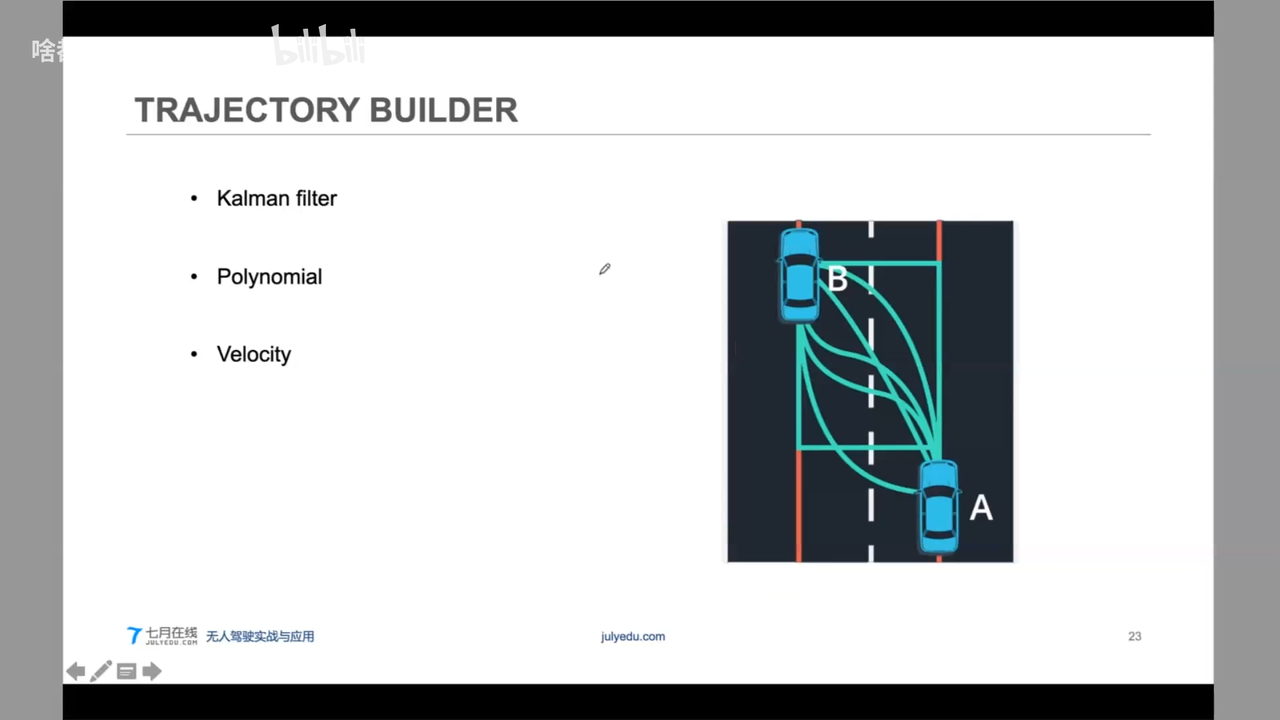
Trajectory builder
- Kalman Filter 卡尔曼滤波
- Polynomial 多项式
- Velocity 动力学方式
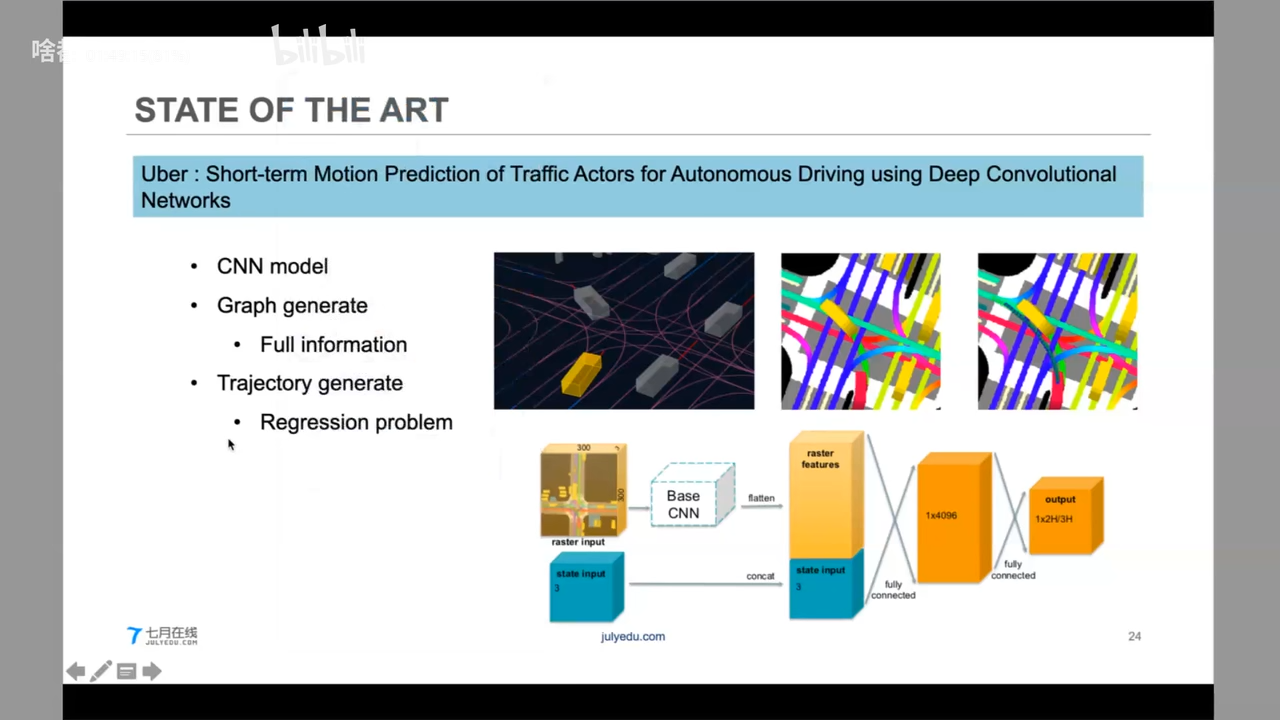
STOA
- 各家各的格式
Uber
—用图表示周围环境
- 当成回归问题,解决
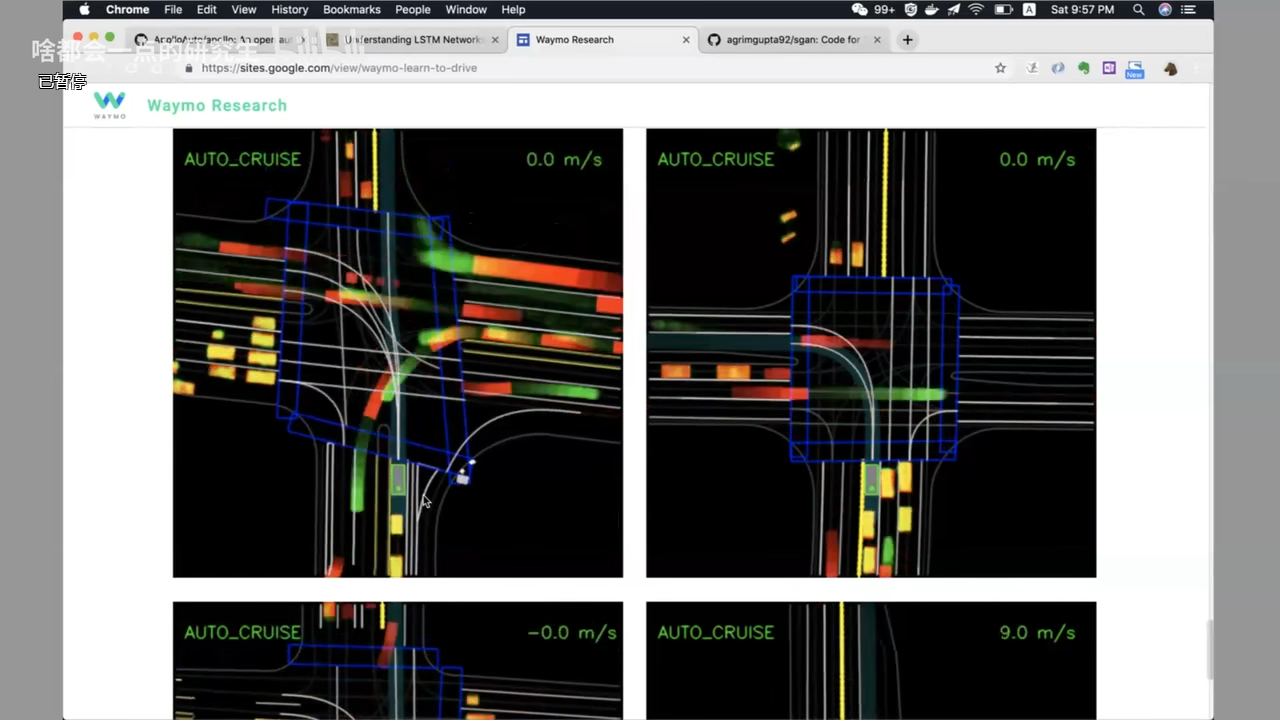
waymo
预测+规划 结合
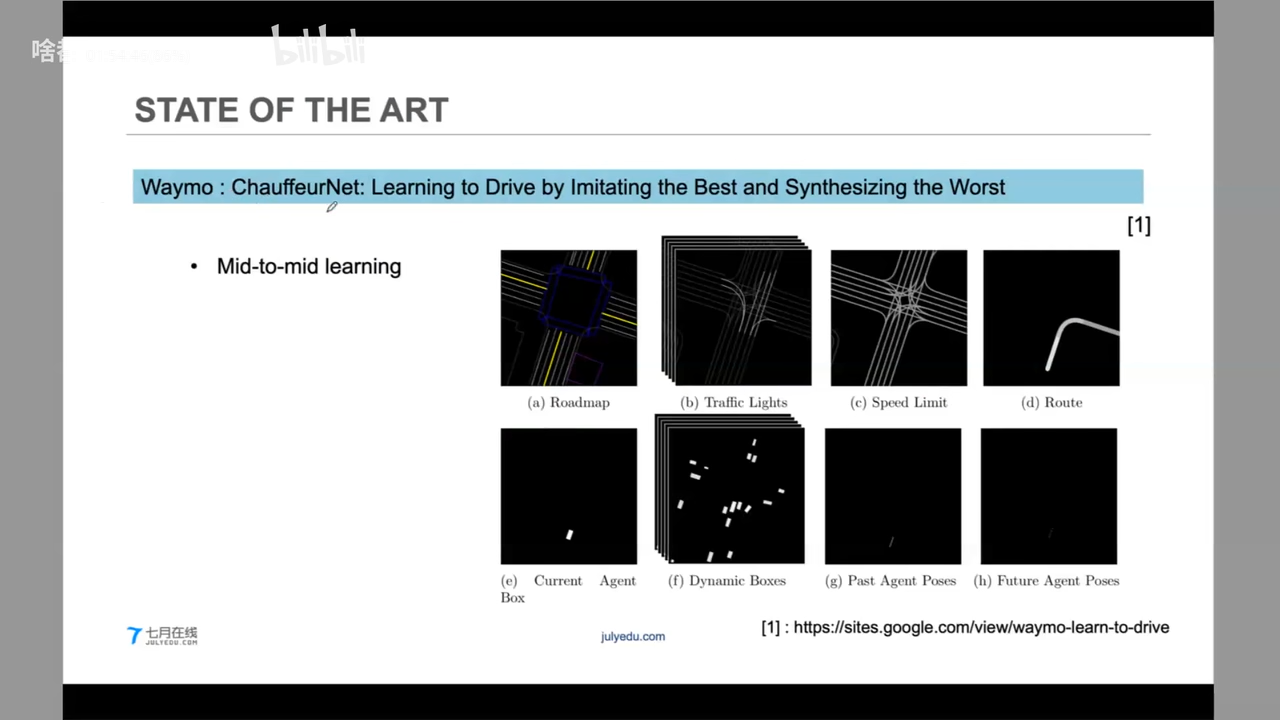
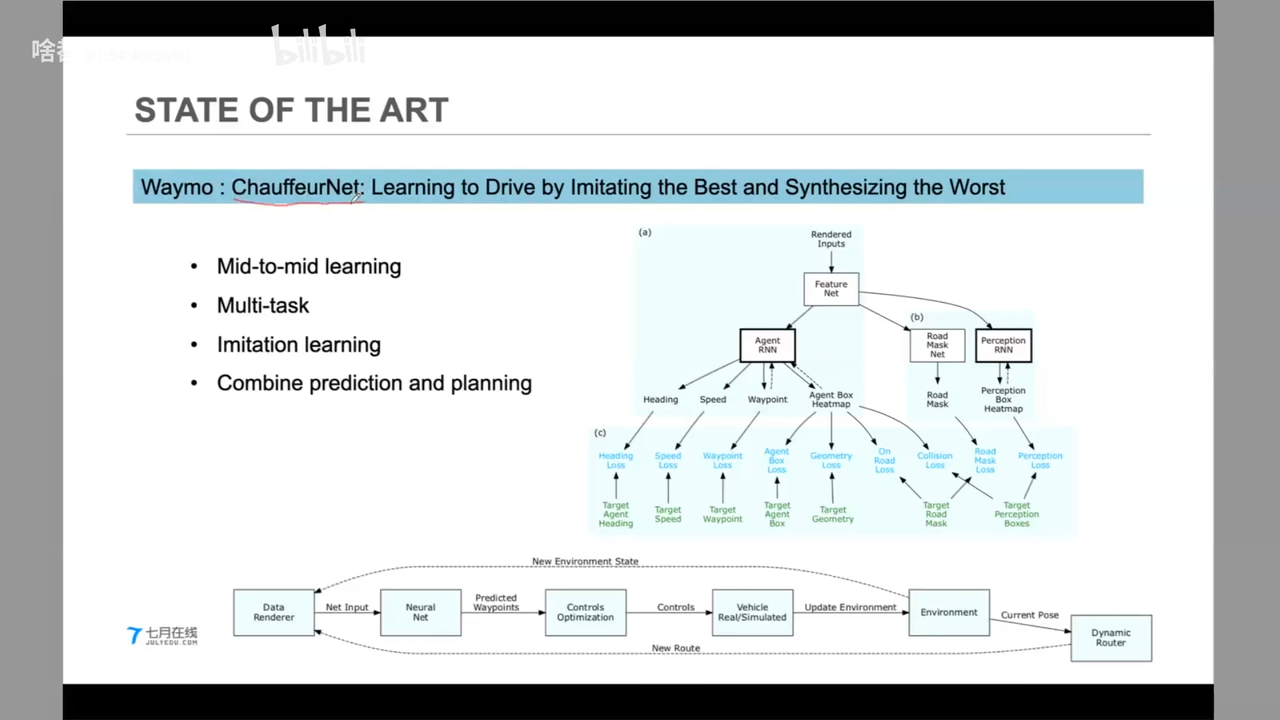
用图的思想去预测
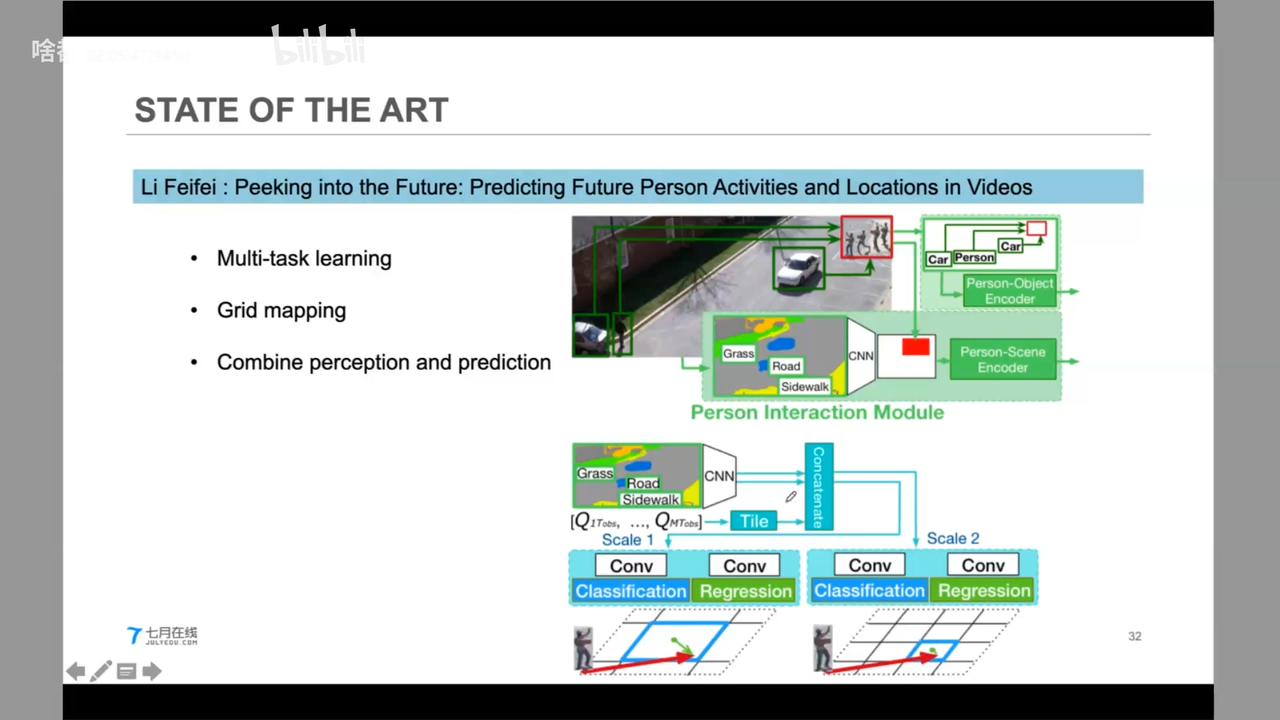
4 Pedestrian predict (行人预测)
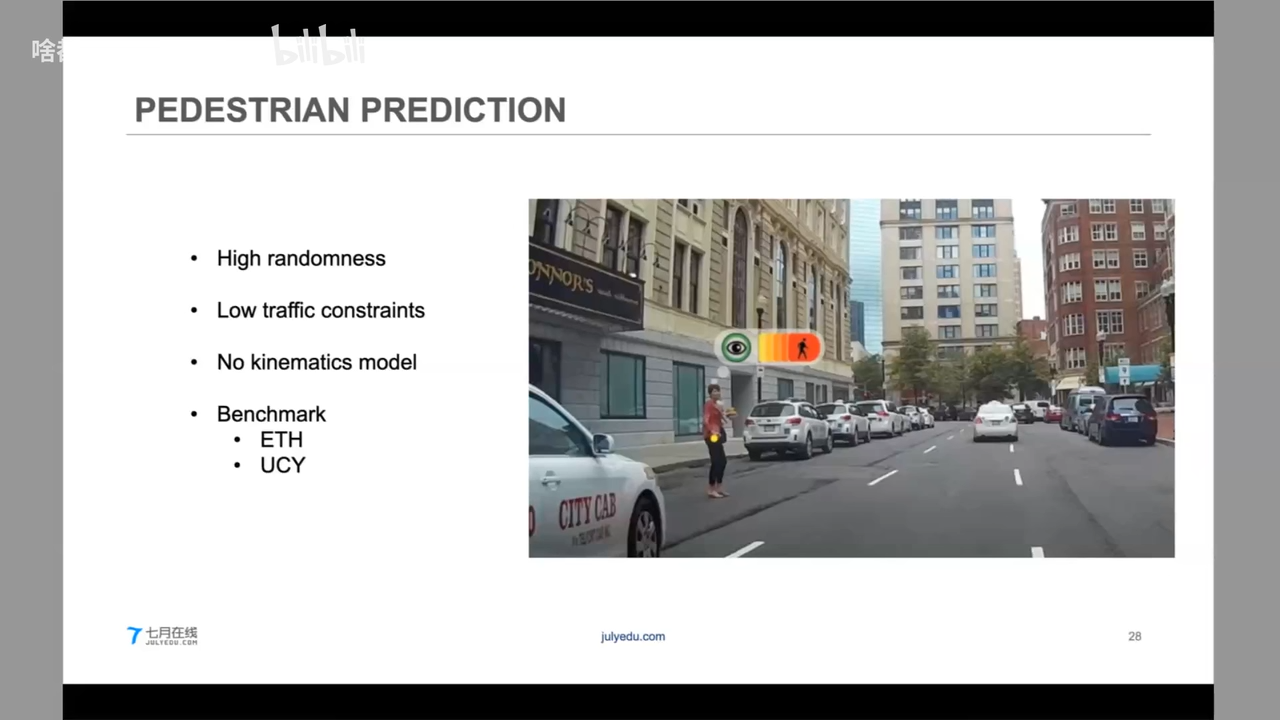
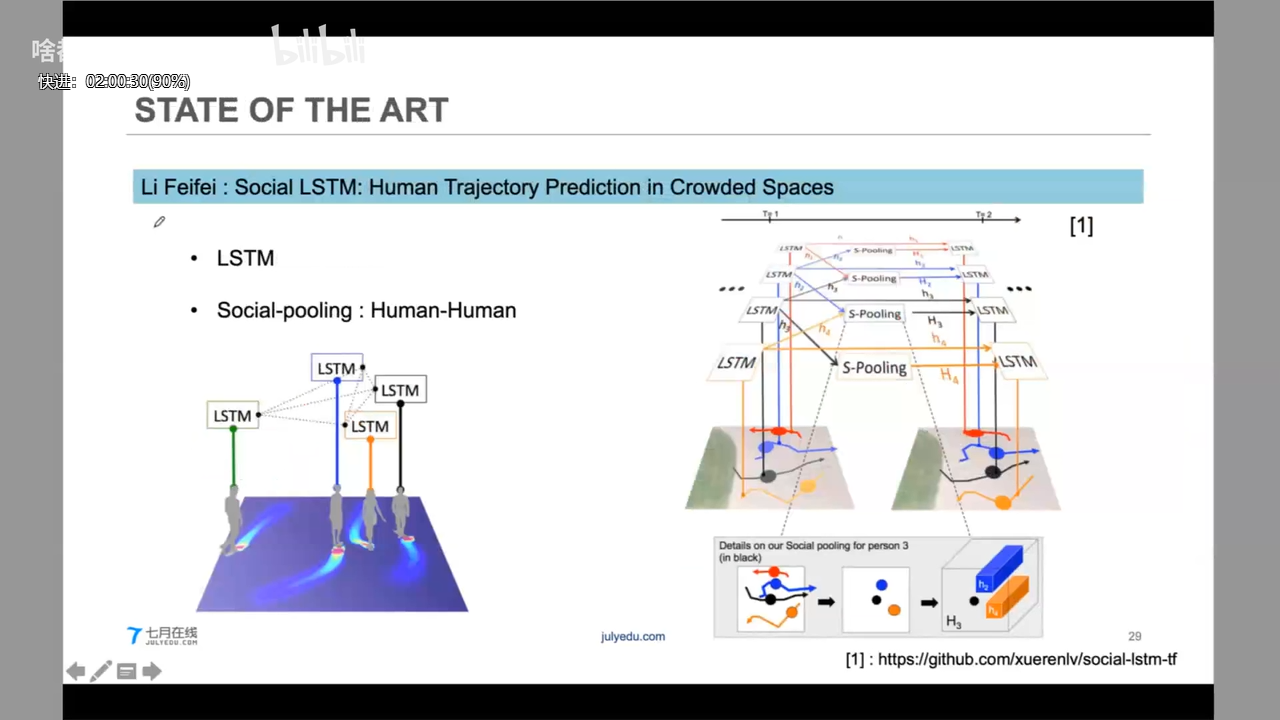
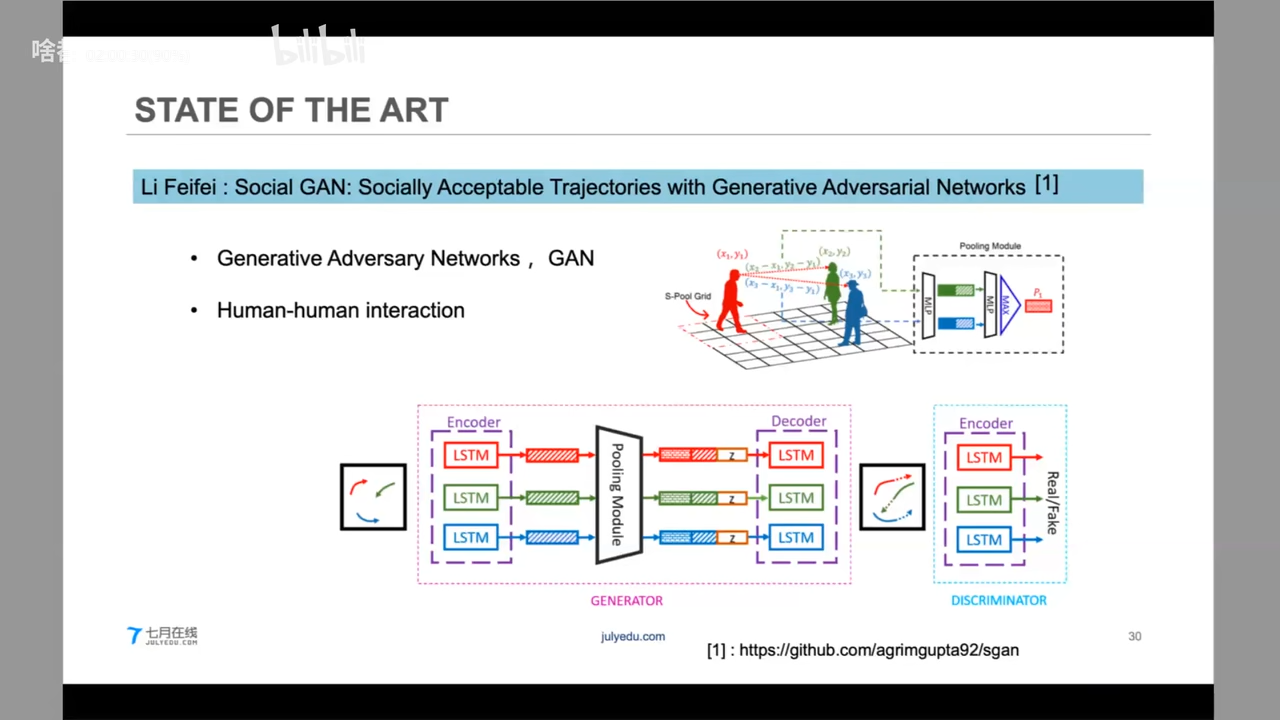
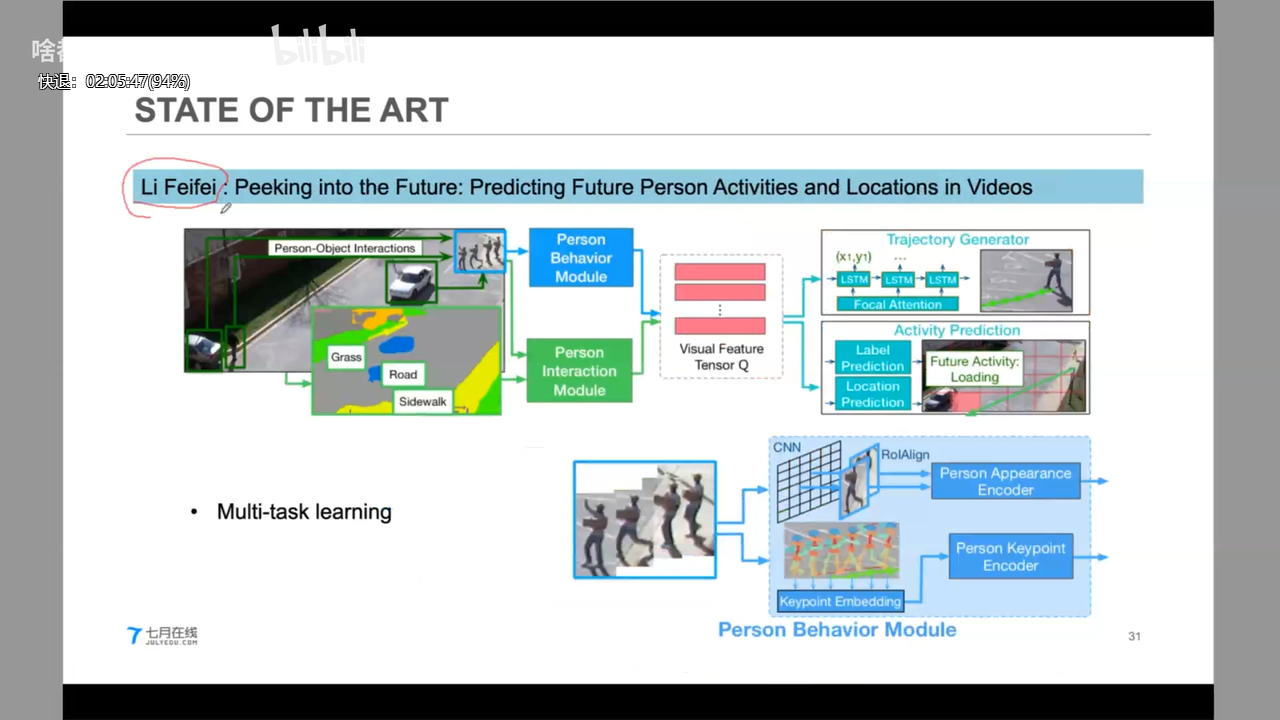
思想:人+人的姿态信息 + 环境信息 + 【分割,识别】 ===形成一个感知预测的结合
输出: 要做的任务(而不是轨迹的预测)
Summary
HomeWork
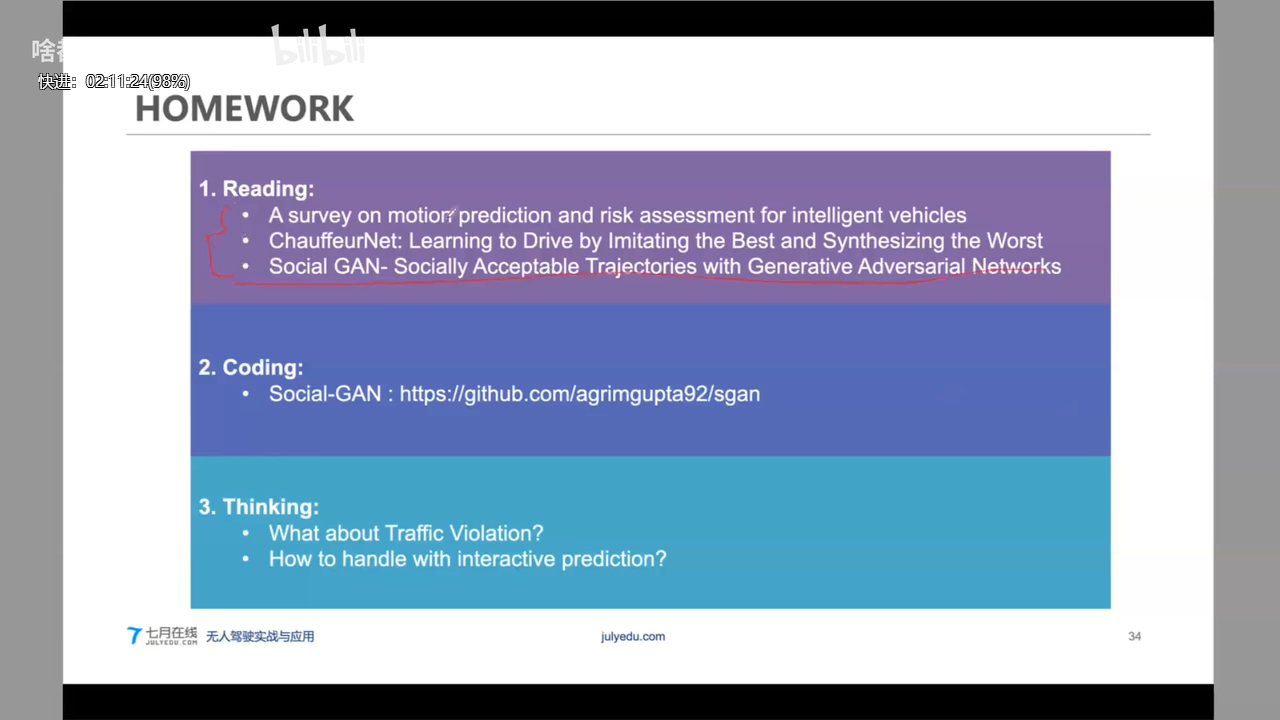
traffic Violation违规交通
博弈问题