相关技术栈
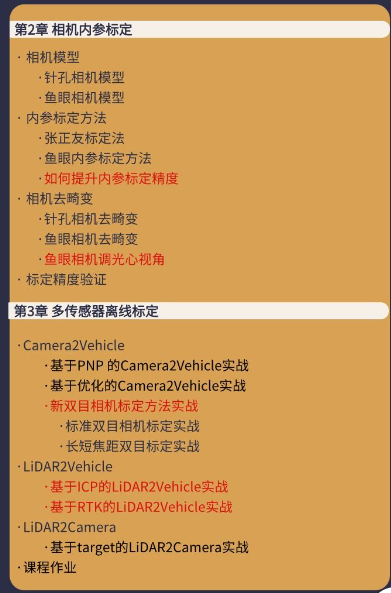
相机标定
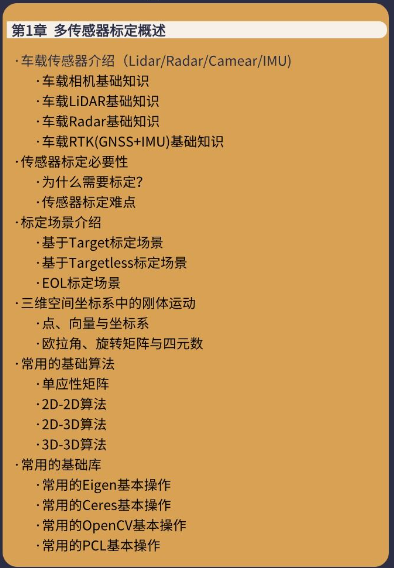
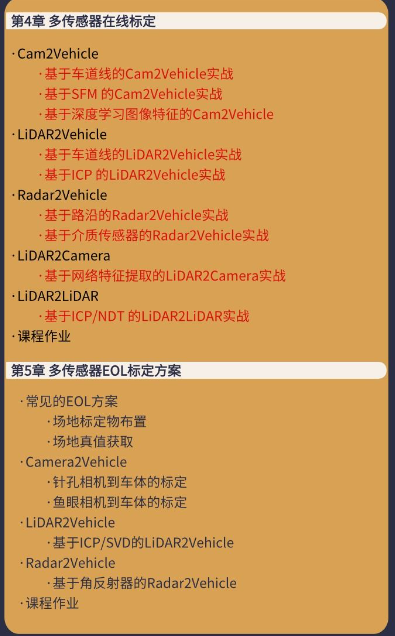
深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
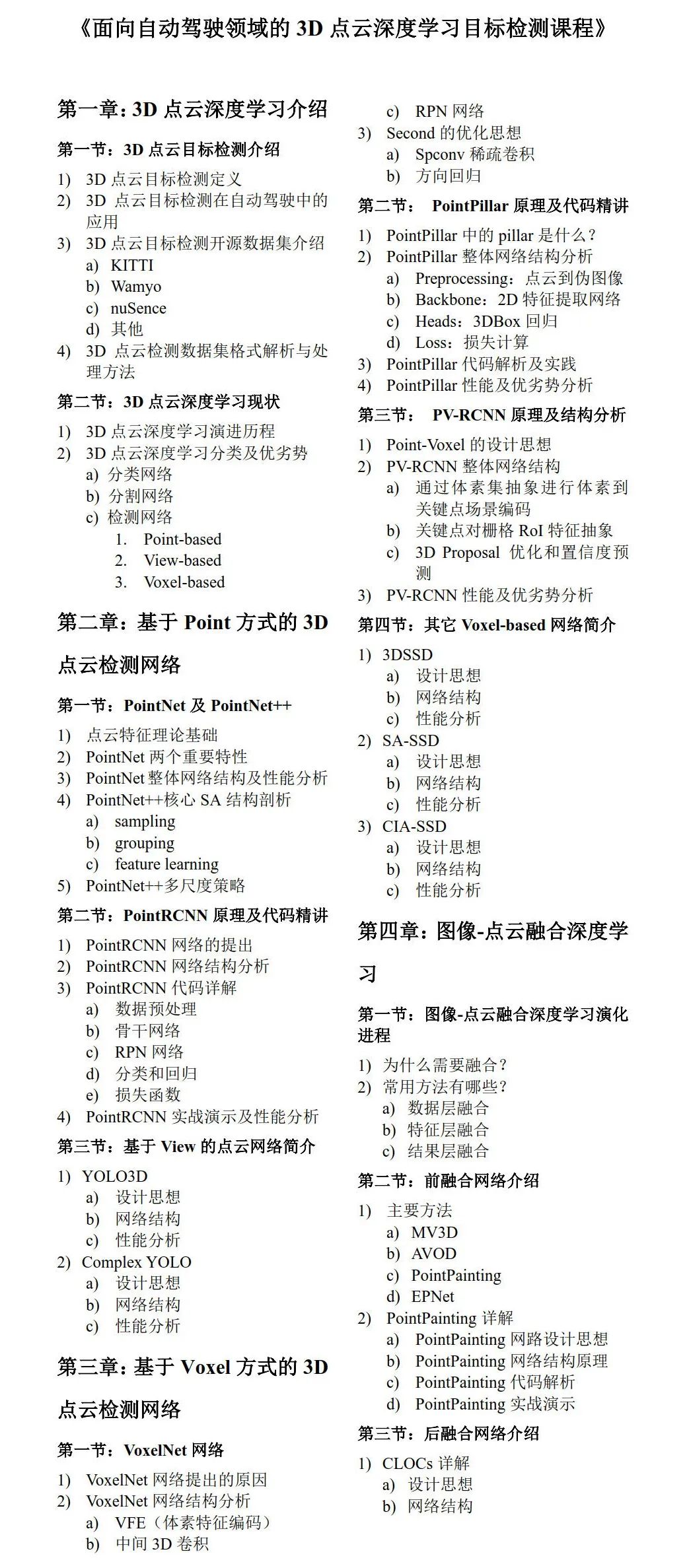
3D目标检测
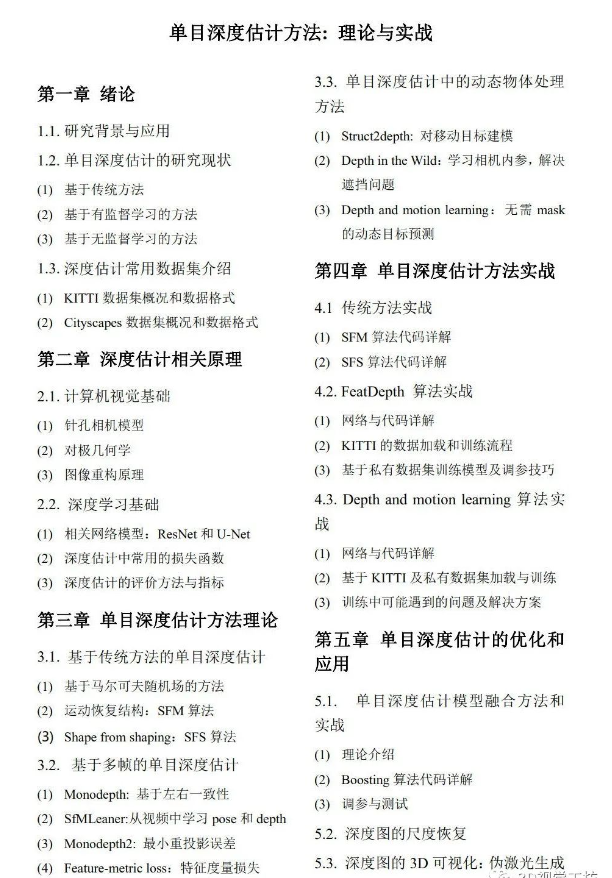
单目深度估计
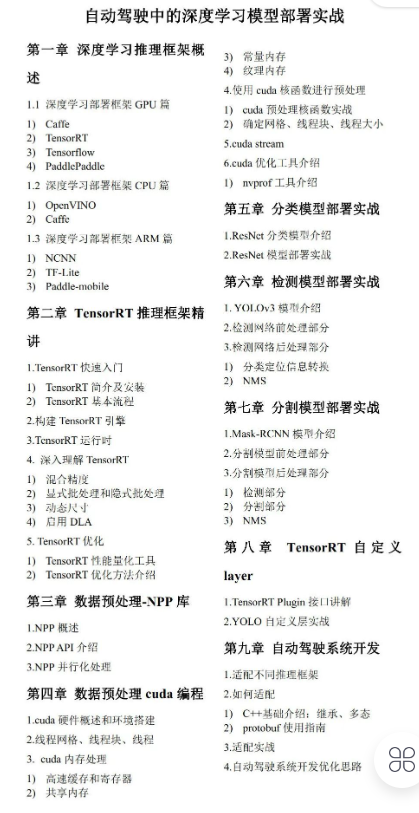
模型部署
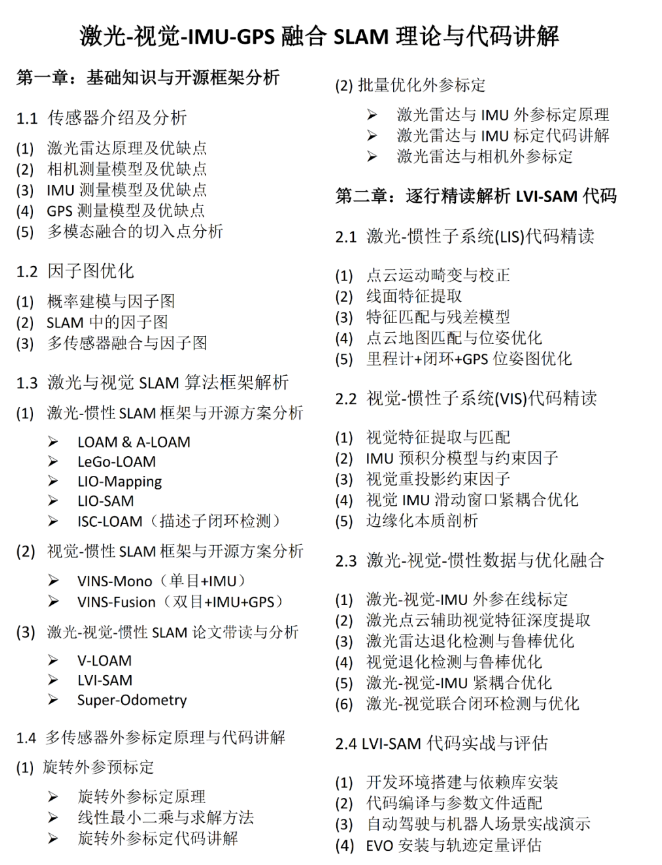
多模态融合SLAM课程
相机标定
第一节:
1.相机模型 2.张正友标定简介 3.改进方法 4.实际标定操作技术全面详解 5.实际标定操作技术全面详解
第二节:
1、标定意义
2、成像模型 3、四大坐标系
4、畸变校正 5、代码实践
第三节:
1、如何绘制高精度椭圆
2、利用迭代优化特征点的方法进行高精度相机标定
标定
3D目标检测
单目深度估计
深度学习模型部署
多模态融合SLAM课程