ubuntu@ubuntu:~/ros2_ws$ ros2 launch mbot_bringup mbot_with_lidar_launch.py [INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2024-08-26-14-58-42-813855-ubuntu-2195 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [mbot_bringup-1]: process started with pid [2197] [INFO] [robot_state_publisher-2]: process started with pid [2199] [INFO] [joint_state_publisher-3]: process started with pid [2201] [INFO] [sllidar_node-4]: process started with pid [2203] [robot_state_publisher-2] Parsing robot urdf xml string. [robot_state_publisher-2] The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a w you can add an extra dummy link to your URDF. [robot_state_publisher-2] Link lidar_link had 0 children [robot_state_publisher-2] Link right_back_wheel had 0 children [robot_state_publisher-2] Link left_back_wheel had 0 children [robot_state_publisher-2] [INFO] [1724684323.340970547] [robot_state_publisher]: got segment base_link [robot_state_publisher-2] [INFO] [1724684323.341309405] [robot_state_publisher]: got segment left_back_wheel [robot_state_publisher-2] [INFO] [1724684323.341378643] [robot_state_publisher]: got segment lidar_link [robot_state_publisher-2] [INFO] [1724684323.341410586] [robot_state_publisher]: got segment right_back_wheel [sllidar_node-4] [INFO] [1724684323.348386895] [sllidar_node]: SLLidar running on ROS2 package SLLidar.ROS2 SDK Version:1.0.1, SLLIDAR SDK Version:2. [sllidar_node-4] [INFO] [1724684323.402525357] [sllidar_node]: SLLidar S/N: DCA19DF1C3E39AC4C3E698F92C76340D [sllidar_node-4] [INFO] [1724684323.402664611] [sllidar_node]: Firmware Ver: 1.27 [sllidar_node-4] [INFO] [1724684323.402700369] [sllidar_node]: Hardware Rev: 5 [sllidar_node-4] [INFO] [1724684323.454031586] [sllidar_node]: SLLidar health status : 0 [sllidar_node-4] [INFO] [1724684323.454176081] [sllidar_node]: SLLidar health status : OK. [joint_state_publisher-3] [INFO] [1724684324.977991460] [joint_state_publisher]: Waiting for robot_description to be published on the robot_descripti. [sllidar_node-4] [ERROR] [1724684327.485681561] [sllidar_node]: Can not start scan: 80008000! ^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT) [mbot_bringup-1] [INFO] [1724684379.574944583] [rclcpp]: signal_handler(signal_value=2) [mbot_bringup-1] [INFO] [1724684379.575556968] [mbot_bringup]: dt:56.246054 [mbot_bringup-1] [mbot_bringup-1] [INFO] [1724684379.575648558] [mbot_bringup]: x_:0.000000 [mbot_bringup-1] [mbot_bringup-1] [INFO] [1724684379.575687038] [mbot_bringup]: y_:0.000000 [mbot_bringup-1] [mbot_bringup-1] [INFO] [1724684379.575721333] [mbot_bringup]: th_:0.000000 [mbot_bringup-1] [robot_state_publisher-2] [INFO] [1724684379.576430992] [rclcpp]: signal_handler(signal_value=2) [INFO] [robot_state_publisher-2]: process has finished cleanly [pid 2199] [INFO] [mbot_bringup-1]: process has finished cleanly [pid 2197] [INFO] [joint_state_publisher-3]: process has finished cleanly [pid 2201] [sllidar_node-4] [INFO] [1724684381.596310322] [sllidar_node]: Stop motor [INFO] [sllidar_node-4]: process has finished cleanly [pid 2203]
mob_launch.py
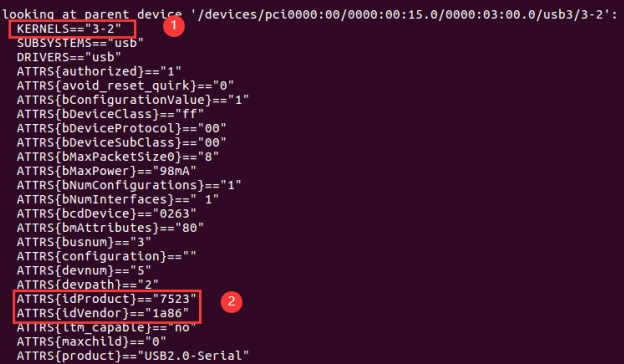
1
$ros2 launch mbot_bringup mbot_launch.py
log
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2024-08-26-14-59-50-148695-ubuntu-2270 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [mbot_bringup-1]: process started with pid [2272] [INFO] [robot_state_publisher-2]: process started with pid [2274] [INFO] [joint_state_publisher-3]: process started with pid [2276] [robot_state_publisher-2] Parsing robot urdf xml string. [robot_state_publisher-2] The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a w you can add an extra dummy link to your URDF. [robot_state_publisher-2] Link lidar_link had 0 children [robot_state_publisher-2] Link right_back_wheel had 0 children [robot_state_publisher-2] Link left_back_wheel had 0 children [robot_state_publisher-2] [INFO] [1724684390.636906578] [robot_state_publisher]: got segment base_link [robot_state_publisher-2] [INFO] [1724684390.637204512] [robot_state_publisher]: got segment left_back_wheel [robot_state_publisher-2] [INFO] [1724684390.637258713] [robot_state_publisher]: got segment lidar_link [robot_state_publisher-2] [INFO] [1724684390.637289175] [robot_state_publisher]: got segment right_back_wheel [joint_state_publisher-3] [INFO] [1724684392.267731058] [joint_state_publisher]: Waiting for robot_description to be published on the robot_descripti.