Blogs
Yiyi Liao 浙大 assistant professor (3D CV)
AIHGF 专栏-语义分割-姿态估计-目标检测-图像分类。。。
github_repository_collection git库收集记录:论文 + 实现
【资源】时尚 +AI 文献、资源大列表 Papers(
Synthesis
Classification] (#3)
Recommendation
Forecast
TOMÁŠ HODAŇ PhD student in computer vision 语义分割,6D姿态评估
Paper_CV_4 语义分割、实例分割
[TOC]
Segmentation Model
- semantic segmentation
- Instance segmentation
| Model | Submitted | ||
|---|---|---|---|
| VGGNet | |||
| ResNet | ENet,FRRN,AdapNey… | ||
| Unet | 2015.5 | ||
| Make R-CNN | 2017.3 | ||
| Mask Scoring R-CNN | |||
| Fast R-CNN | |||
| FPN | 2017.4 | 特征金字塔(Feature Pyramid)特征金字塔是不同尺度目标识别系统的基本组成部分。 | |
| Human Part Segmentation | |||
| FCN | 2014.11 | ||
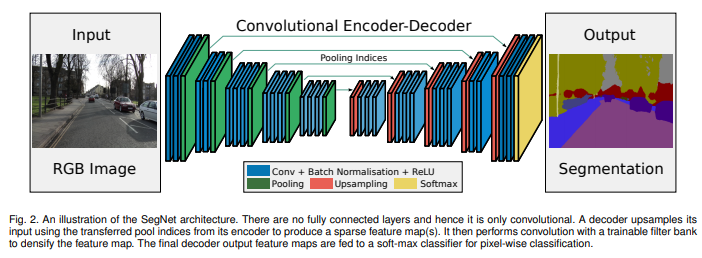
| Segnet | 2015.11 | 剑桥提出的旨在解决自动驾驶或者智能机器人的图像语义分割深度网络,SegNet基于FCN,与FCN的思路十分相似 | |
| Attention | |||
| DeepLab v3(Vgg-16 / resnet-101) | |||
| LIP-SSL | CVPR 2017 | ||
| LIP-JPPNet | 2018.4 | ||
| SS-JPPNet | 2018.4 | ||
| PGN | 2018 | “Instance-level Human Parsing via Part Grouping Network”, ECCV 2018 (Oral). | |
| Parsing R-CNN | 2018.11 | ||
| Self-Correction for Human Parsing | CVPR2019 | ranks 1st in CVPR2019 LIP Challenge. |
参考:https://zhuanlan.zhihu.com/p/70758906
【segmentation】
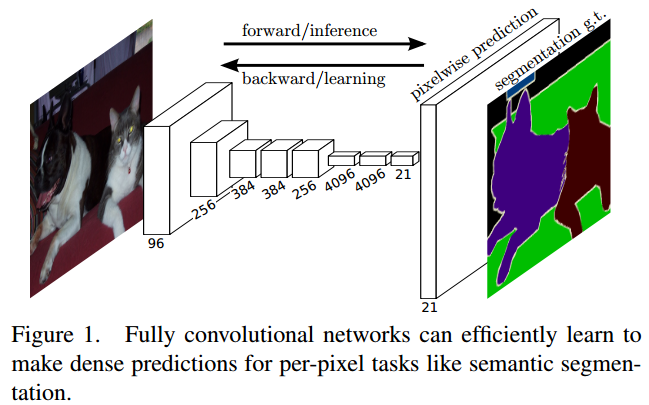
[32] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In CVPR, 2015.
[6] J. Dai, K. He, and J. Sun. Instance-aware semantic segmentation via multi-task network cascades. In CVPR, 2016.
[3] L. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. Yuille. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. TPAMI, 2016.
[4] L. Chen, G. Papandreou, F. Schroff, and H. Adam. Rethinking atrous convolution for semantic image segmentation. arXiv:1706.05587, 2017.
[41] L. Yi, H. Qi, J. Dai, X. Ji, and Y. Wei. Fully convolutional instance-aware semantic segmentation. In CVPR, 2017.
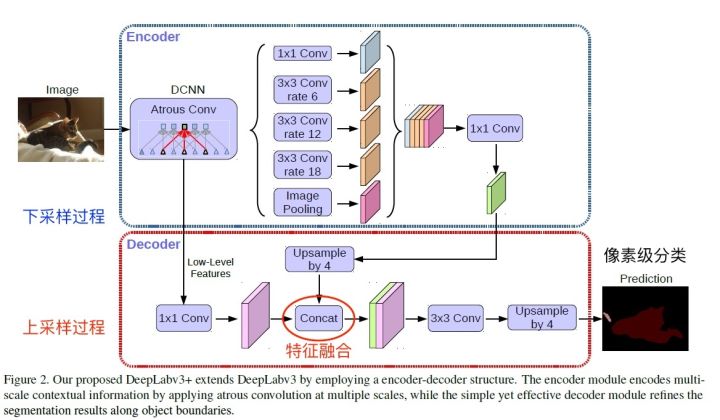
[5] L. Chen, Y. Zhu, G. Papandreou, F. Schroff, and H. Adam. Encoder-decoder with atrous separable convolution for semantic image segmentation. In ECCV, 2018.
[30] S. Liu, L. Qi, H. Qin, J. Shi, and J. Jia. Path aggregation network for instance segmentation. In CVPR, 2018.
[22] A. Kirillov, K. He, R. Girshick, C. Rother, and P. Dollar. Panoptic segmentation. arXiv:1801.00868, 2018.
【human parsing 】
[25] J. Li, J. Zhao, Y. Wei, C. Lang, Y. Li, T. Sim, S. Yan, and J. Feng. Multi-human parsing in the wild. arXiv:1705.07206, 2017.
[12] K. Gong, X. Liang, Y. Li, Y. Chen, and L. Lin. Instance-level human parsing via part grouping network. In ECCV, 2018.
[24] J. Li, J. Zhao, Y. Chen, S. Roy, S. Yan, J. Feng, and T. Sim. Multi-human parsing machines. In ACM MM, 2018.
[27] X. Liang, K. Gong, X. Shen, and L. Lin. Look into person: Joint human parsing and pose estimation network and a new benchmark. TPAMI, 2018.
[43] J. Zhao, J. Li, Y. Cheng, and J. Feng. Understanding humans in crowded scenes: Deep nested adversarial learning and a new benchmark for multi-human parsing. In ACM MM, 2018.
[20] R. Hu, P. Dollar, K. He, T. Darrell, and R. Girshick. Learning to segment every thing. In CVPR, 2018.
[ ] Parsing R-CNN for Instance-Level Human Analysis
【detection】
[7] C. Gao, Y. Zou, and J. Huang. ican: Instance-centric attention network for human-object interaction detection. In BMVC,2018.
[9] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, 2014
[19] H. Hu, J. Gu, Z. Zhang, J. Dai, and Y. Wei. Relation networks for object detection. In CVPR, 2018.
[28] T. Lin, P. Dollar, R. Girshick, K. He, B. Hariharan, and S. Be- ´ longie. Feature pyramid networks for object detection. In CVPR, 2017.
[33] S. Ren, K. He, R. Girshick, and J. Sun. Faster r-cnn: Towards real-time object detection with region proposal networks. In NIPS, 2015.
【 estimation 】
[14] R. Guler, N. Neverova, and I. Kokkinos. Densepose: Dense human pose estimation in the wild. In CVPR, 2018.
[27] X. Liang, K. Gong, X. Shen, and L. Lin. Look into person: Joint human parsing and pose estimation network and a new benchmark. TPAMI, 2018.
[34] G. Rohit, G. Georgia, T. Lorenzo, P. Manohar, and T. Du. Detect-and-track: Efficient pose estimation in videos. In CVPR, 2018.
【recognition】
[16] K. He, X. Zhang, S. Ren, , and J. Sun. Deep residual learning for image recognition. In CVPR, 2016.
[17] K. He, X. Zhang, S. Ren, and J. Sun. Spatial pyramid pooling in deep convolutional networks for visual recognition. In ECCV, 2014.
[35] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein, A. C. Berg, and L. Fei-Fei. Imagenet large scale visual recognition challenge. IJCV, 2015.
[37] J. R. Uijlings, K. E. van de Sande, T. Gevers, and A. W. Smeulders. Selective search for object recognition. IJCV, 2013.
[8] R. Girshick. Fast r-cnn. In ICCV, 2015.
[10] R. Girshick, F. N. Iandola, T. Darrell, and J. Malik. Deformable part models are convolutional neural networks. In CVPR, 2015.
[11] G. Gkioxari, R. Girshick, P. Dollar, and K. He. Detecting and recognizing human-object interactions. In CVPR, 2018.
[13] P. Goyal, P. Dollar, R. Girshick, P. Noordhuis, L. Wesolowski, A. Kyrola, A. Tulloch, Y. Jia, and K. He. Accurate, large minibatch sgd: Training imagenet in 1 hour. arXiv:1706.02677, 2017.
[15] K. He, G. Gkioxari, P. Dollar, and R. Girshick. Mask r-cnn. In ICCV, 2017.
[18] K. He, X. Zhang, S. Ren, and J. Sun. Identity mappings in deep residual networks. In ECCV, 2016.
[21] S. Ioffe and C. Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In ICML, 2015.
[29] T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollar, and C. L. Zitnick. Microsoft coco: Common objects in context. In ECCV, 2014.
[23] A. Krizhevsky, I. Sutskever, and G. Hinton. Imagenet classification with deep convolutional neural networks. In NIPS, 2012.
[26] Z. Li and F. Zhou. Fssd: Feature fusion single shot multibox detector. arXiv:1712.00960, 2017.
[31] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, and S. Reed. Ssd: Single shot multibox detector. In ECCV, 2016.
[36] C. Szegedy, V. Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna. Rethinking the inception architecture for computer vision. In CVPR, 2016.
[38] X. Wang, R. Girshick, A. Gupta, and K. He. Non-local neural networks. In CVPR, 2018.
[39] Y. Wu and K. He. Group normalization. In ECCV, 2018.
[40] S. Xie, R. Girshick, P. Dollar, Z. Tu, and K. He. Aggregated ´ residual transformations for deep neural networks. In CVPR, 2017.
[42] M. Zeiler and R. Fergus. Visualizing and understanding convolutional neural networks. In ECCV, 2014.
[44] C. L. Zitnick and P. Dollar. Edge boxes: Locating object ´ proposals from edges. In ECCV, 2014
FCN
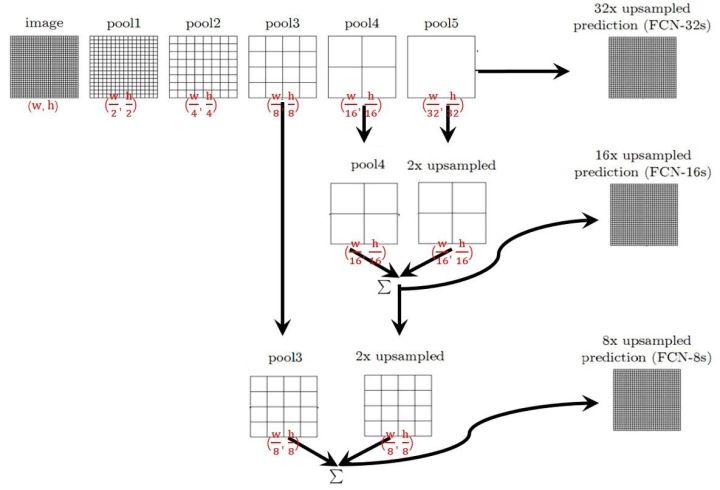
FCN提出可以把后面几个全连接都换成卷积,这样就可以获得一张2维的feature map,后接softmax获得每个像素点的分类信息,从而解决了分割问题
那么:
- 对于FCN-32s,直接对pool5 feature进行32倍上采样获得32x upsampled feature,再对32x upsampled feature每个点做softmax prediction获得32x upsampled feature prediction(即分割图)。
- 对于FCN-16s,首先对pool5 feature进行2倍上采样获得2x upsampled feature,再把pool4 feature和2x upsampled feature逐点相加,然后对相加的feature进行16倍上采样,并softmax prediction,获得16x upsampled feature prediction。
- 对于FCN-8s,首先进行pool4+2x upsampled feature逐点相加,然后又进行pool3+2x upsampled逐点相加,即进行更多次特征融合。具体过程与16s类似,不再赘述。
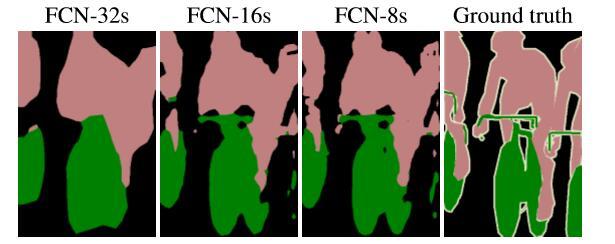
作者在原文种给出3种网络结果对比,明显可以看出效果:FCN-32s < FCN-16s < FCN-8s,即使用多层feature融合有利于提高分割准确性。
U-Net
https://arxiv.org/abs/1505.04597
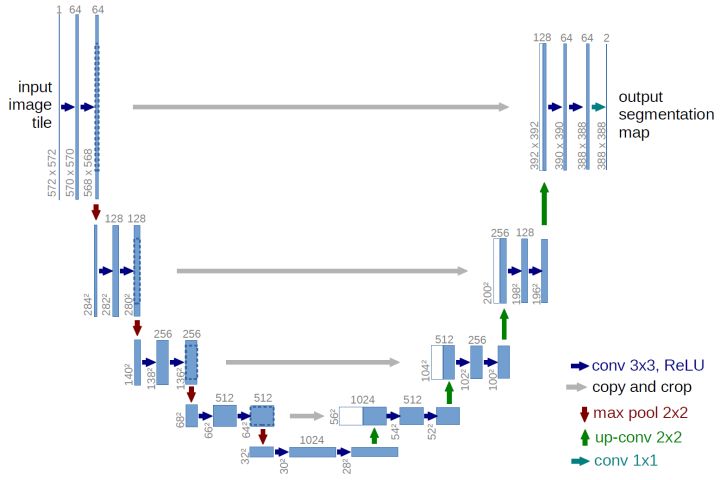
语义分割网络在特征融合时也有2种办法:
- FCN式的逐点相加,对应caffe的EltwiseLayer层,对应tensorflow的tf.add()
- U-Net式的channel维度拼接融合,对应caffe的ConcatLayer层,对应tensorflow的tf.concat()
总结一下,CNN图像语义分割也就基本上是这个套路:
- 下采样+上采样:Convlution + Deconvlution/Resize
- 多尺度特征融合:特征逐点相加/特征channel维度拼接
- 获得像素级别的segement map:对每一个像素点进行判断类别
DeepLab v3
语义分割
SegNet
Bayesian SegNet
FCN
https://arxiv.org/pdf/1605.06211.pdf
https://arxiv.org/pdf/1411.4038.pdf
LIP-JPPNet
1 | label_colours = [(0,0,0) |
PGN 2018
BiSeNet v1/v2 2018
旷世科技 ECCV 2018
旷视科技提出双向网络BiSeNet:实现实时语义分割
实例分割
Mark R-CNN 2017
像素级分割
RoiAlign——重对齐 RoIPool 以使其更准确
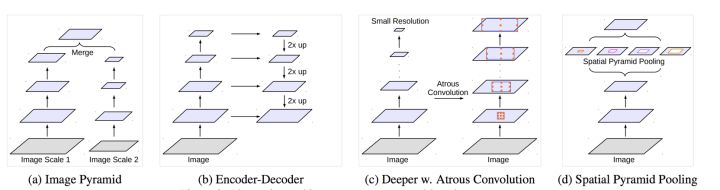
在处理多尺度物体分割时,我们通常会有以下几种方式来操作:
https://www.zhihu.com/question/54149221
Searching for MobileNetV3 ICCV 2019
Naive-Student: Leveraging Semi-Supervised Learning in Video Sequences for Urban Scene Segmentation ECCV 2020
Swin Transformer(微软)
Ref:
TensorRT int8
[TOC]
TensorRT IN TF
主题思想:Tensorflow->TensorRT(pb->uff)
TensorRT-Int8
Int8 calibration in Pythonmnist_demo
step:
1 create a INT8 calibrator
build and calibrate an engine for INT8 mode
run interence in INT8 mode
Tensorflow Learning rate
TRAIN_GPUS_LR_BATCH
[toc]
Facebook,Google和Berkeley多个组都发表了论文对这一问题进行了理论和实验的讨论,首先我们对这些论文的结果做一个简要的总结。三篇论文研究类似,但是每一篇相对于前一篇都有改进。
Facebook:1小时内培训Imagenet
贡献:
提出了线性缩放规则,当批量变为K倍时,学习速度需要乘以K就能够达到同样的训练结果。看似简单的定律,Facebook的论文给出了不完整的理论解释和坚实的实验证明。除此之外,论文还讨论了如何处理批量标准化如何实现分布式SGD。通过线性缩放规则,Facebook成功的在一小时内训练了批量大小为8192的Resnet 50。
缺陷:
当批量超过8000时观测到了模型训练结果会严重变差。
Paper_CV_Attention
[TOC]
CNN 注意力机制:
- 图片分类
- 图片切割/语义分割
注意力机制分类:
soft attention: SENet, CBAM
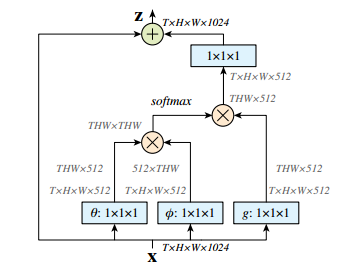
self attention: Nonlocal, DANet
Atrous Self Attention、Local Self Attention、Sparse Self Attention都算是稀疏Attention,直观上来看就是注意力矩阵变得很稀疏了。
注意力机制可以分为四类:
1 | 基于输入项的柔性注意力(Item-wise Soft Attention)、 |
总的来说,一种是软注意力(soft attention),另一种则是强注意力(hard attention)。
软注意力的关键点在于,这种注意力更关注区域或者通道,而且软注意力是确定性的注意力,学习完成后直接可以通过网络生成,最关键的地方是软注意力是可微的,这是一个非常重要的地方。可以微分的注意力就可以通过神经网络算出梯度并且前向传播和后向反馈来学习得到注意力的权重。
强注意力与软注意力不同点在于,首先强注意力是更加关注点,也就是图像中的每个点都有可能延伸出注意力,同时强注意力是一个随机的预测过程,更强调动态变化。当然,最关键是强注意力是一个不可微的注意力,训练过程往往是通过**增强学习(reinforcement learning)**来完成的。
从注意力域(attention domain)的角度来分析几种注意力的实现方法。其中主要是三种注意力域,空间域(spatial domain),通道域(channel domain),混合域(mixed domain)。
Paper_CV_Nolocal
Paper_CV_SENET
[toc]
SENet
我们可以看到,已经有很多工作在空间维度上来提升网络的性能。那么很自然想到,网络是否可以从其他层面来考虑去提升性能,比如考虑特征通道之间的关系?我们的工作就是基于这一点并提出了 Squeeze-and-Excitation Networks(简称 SENet)。在我们提出的结构中,Squeeze 和 Excitation 是两个非常关键的操作,所以我们以此来命名。我们的动机是希望显式地建模特征通道之间的相互依赖关系。另外,我们并不打算引入一个新的空间维度来进行特征通道间的融合,而是采用了一种全新的「特征重标定」策略。具体来说,就是通过学习的方式来自动获取到每个特征通道的重要程度,然后依照这个重要程度去提升有用的特征并抑制对当前任务用处不大的特征。
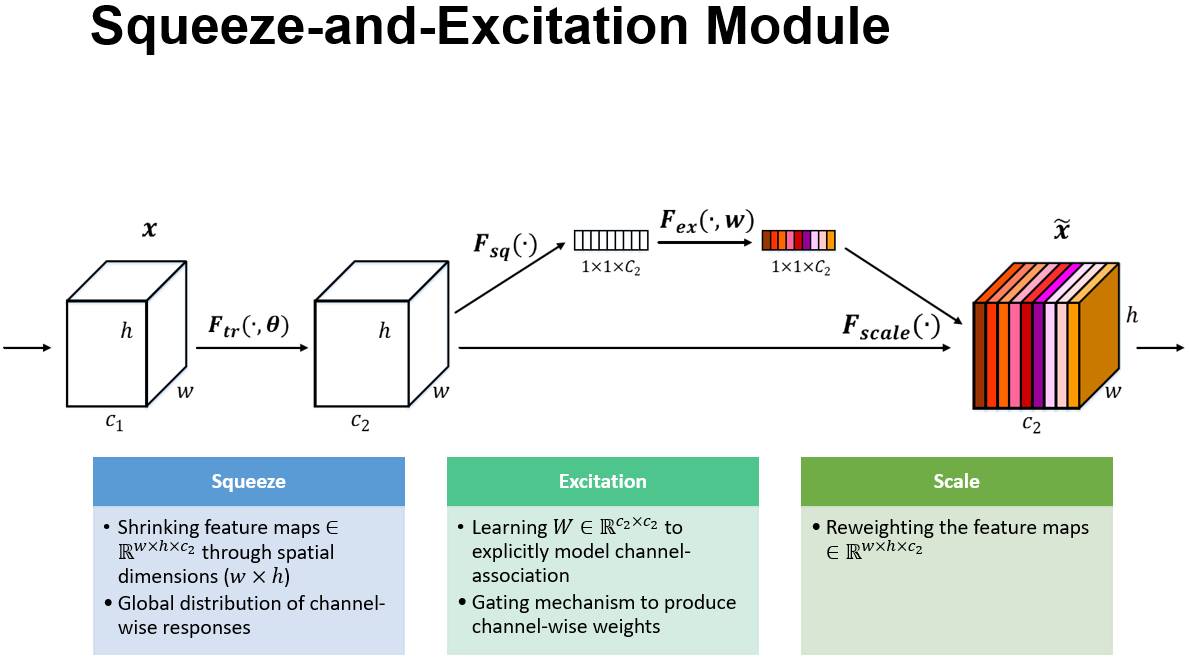
Squeeze:挤,榨
Excitation:激发
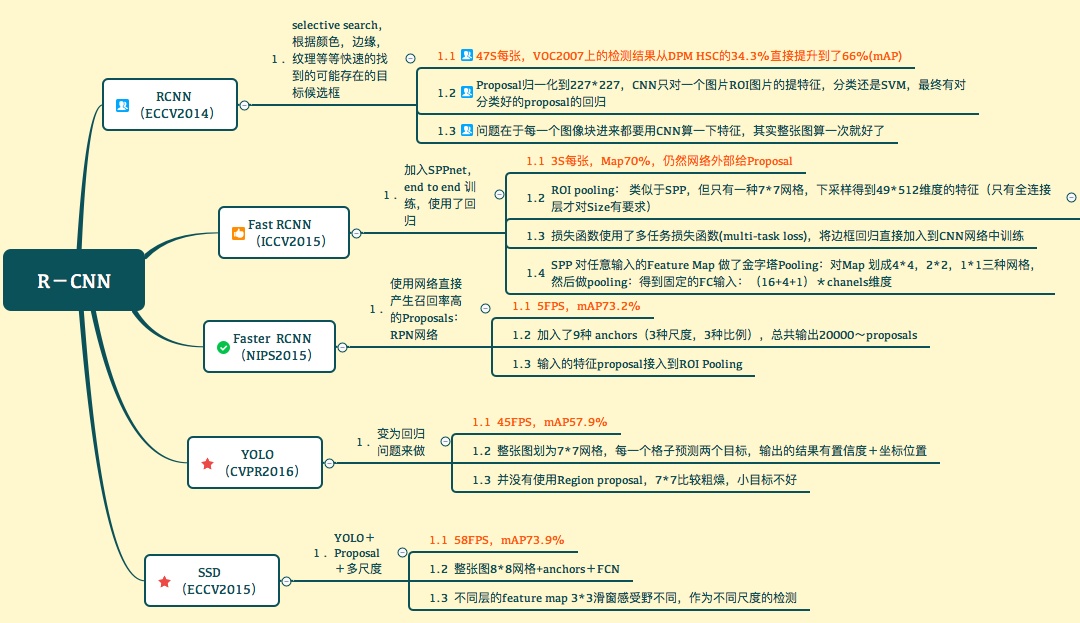
CV Regions-CNN(R-CNN)