Math
高斯分布(Gaussian Distribution)的概率密度函数(probability density function) - amoyzhu - 博客园
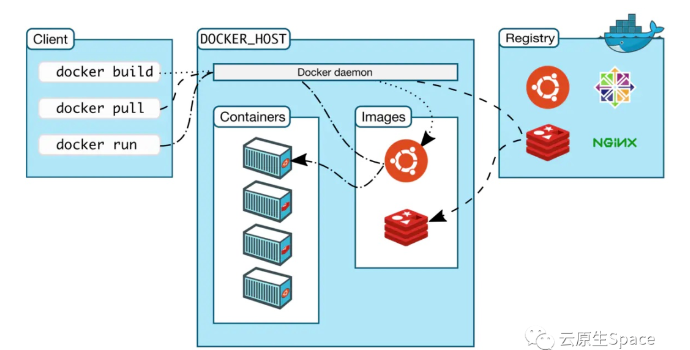
Docker 架构
1 | sudo apt update |
Refs:
#ZhiHu 2023最新WSL搭建深度学习平台教程(适用于Docker-gpu、tensorflow-gpu、pytorch-gpu)
[Medium Article]Nvidia Docker on WSL2
【Dockers】Turn on Docker Desktop WSL 2]
WSL/Ubuntu+Docker配置_wsl docker-CSDN博客
WSL安装Ubantu和Docker使用_wsl ubuntu docker-CSDN博客
# Docker镜像瘦身大小从1.43 GB减少到22.4MB
1 | "Docker Desktop Installer.exe" install --installation-dir="E:\Program Files\Docker" |
Desktop->Settings->Docker->Engine
1 | { |
多读书,多思考
夯实基础,
多实践,多总结
(日日练)英语阅读,听力,口语
技术,管理精进
人情练达
外语
英语话题导与练满分作文(初中)
英语话题导与练·满分作文(高中)
词根词缀分类记忆18000英语单词
把你的英语用起来(收费)
口语-跟读
人情世故
《方与圆》
《左右逢源的交际心经》
《中国人的人情世故》
《每天懂一点人情世故》
《侯卫东官场笔记》
《胡雪岩》
《我不是教你诈》
SLAM(Auto)
ML
DL框架
RL基础理论+GYM实践
Robot
Algorithm
LLM
DeepSpeed模型加速训练
百度AppBuilder使用
AIGC
推荐系统
知识图谱
本篇文章介绍采用gperftools 工具集中的CPU profiler 来对C++程序进行性能分析。gperftools 是 Google开源的一款包含 多线程下高性能内存分配器 tcmalloc 实现和 其他性能分析工具的集合。用户可以单独使用其中的某项工具,也可以全部使用。
Nsight Systems is a statistical sampling profiler with tracing features. 官方解释是1个统计采样器,带了追踪的特性。两个方面讲:
它是个系统级的性能分析工具,在服务器端用nsys-cli 命令行采集完成后,能通过GUI可视化地展示 程序各环节运行耗时,包括CPU 和 各个系列的GPU。